{kind=link}
{kind=link}
C++ code for swerve drive: 2x SPARK MAX/NEO plus SRX MAG ENCODER per swerve module (i.e SDS Swerve Module); with Test Mode code.
See SwerveSensorInterfaceBoard for details on electrical connections.
Here are some of the features implemented in this code:
- Handling PWM input from SRX MAG ENCODER to derive absolute position;
- Handling SPARK MAX motor controllers;
- Profiled PID control of turning position;
- Using turning position to override commanded drive, when modules are not facing in commanded direction;
- Distance and velocity Profiled PID control of drive motors;
- Test Mode includes interactive adjustment of PID settings;
- Error handling for motor controllers, up to being able to test code on a roboRIO with no motor controllers;
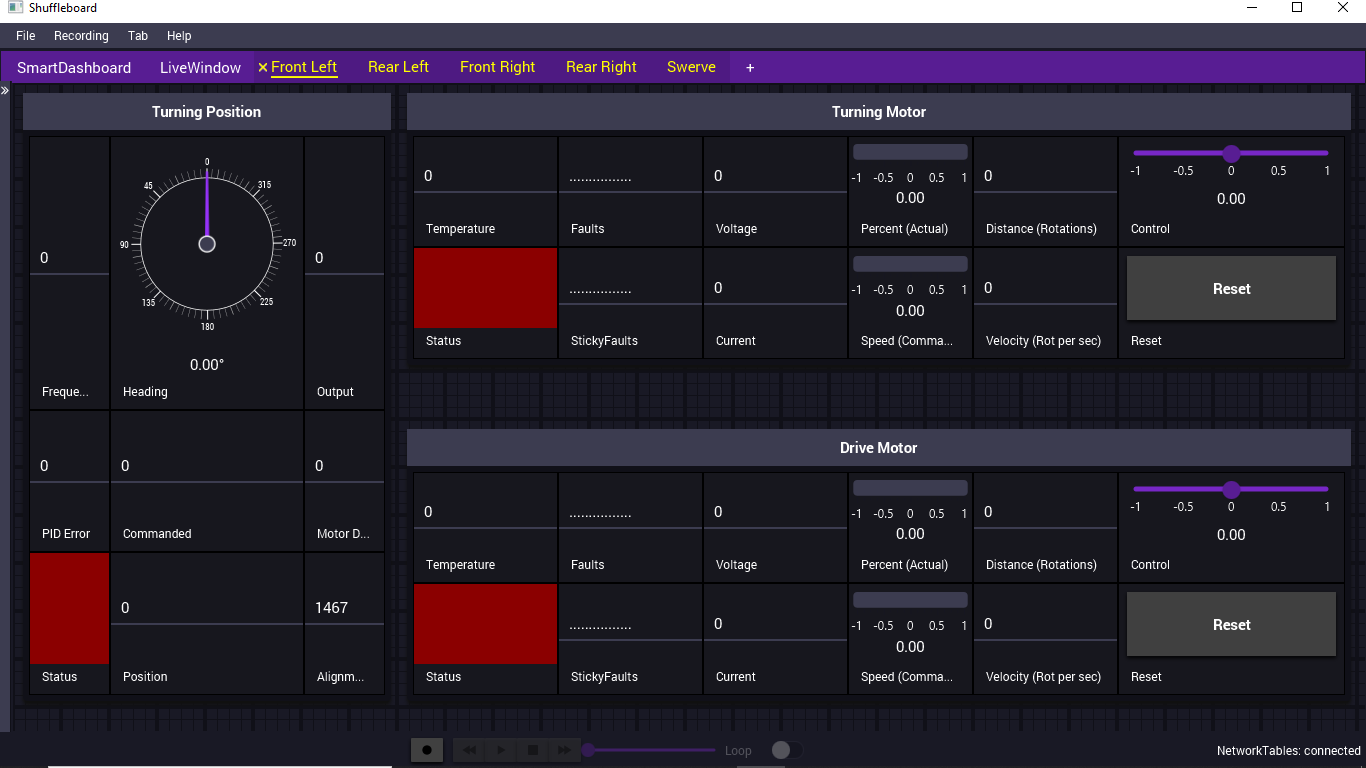
- Test Mode uses Shuffleboard to create a tab for each swerve module, and a tab for the overall swerve drive;
- Step-by-step bring up procedure for swerve modules and drive system is documented in block comments (in SwerveModule.h);
- Provides several Test Mode routines to automatically have robot drive various fixed test patterns;
- Logic to manage and save configuration of motor controller settings;
- Primitives useful for autonomous driving;
- Integrated with WPILib.
Please see (and/or use) shuffleboard.json for suggested Shuffleboard settings.