
Welcome to the tutorial on how to create a Depth Map, do Object Detection, and determine the distance to objects using a Stereo Vision camera!
Check out the step-by-step tutorial here:
All the scipts that we will run are in the main_scripts directory
In main_scripts:
Starts the Raspberry Pi cameras on the Jetson Nano using a Gstreamer pipeline.
To change camera capture or display resolution, use this script.
A continuous program to take 30 pictures at 5 second intervals for calibration. This is where pictures of the Chessboard will be taken.
You can change the interval between pictures and also the total number of pictures you want to take.
Used to filter between good and poor quality images. Reject those with poor quality (blurry, chessboard cut out, etc.) to avoid having poor calibration results.
Press Y to accept and N to reject
Accepted images will be split into left and right pairs and be saved into the 'pairs' folder.
This will go through the point-matching process and show images for each pair:

Ensure that the quality of the corner detection is good. If not, retake your pictures.
Tuning the depth map. Descriptions for all the variables are here:
| Variables | Description | Range |
|---|---|---|
| SAD Windows Size (SWS) | Computes the intensity difference for each center pixel. To learn more: https://www.researchgate.net/figure/Depth-maps-of-the-SAD-implementation-with-window-sizes-of-5x5left-7x7centre-and_fig9_266070395 |
5 - 255 & Odd |
| Speckle Size | Number of pixels below which a disparity blob is dismissed as "speckle." | 0 - 300 |
| Speckle Range | Controls how close in value disparities must be to be considered part of the same blob. | 0 - 40 |
| Uniqueness Ratio | Another post-filtering step. If the best matching disparity is not sufficiently better than every other disparity in the search range, the pixel is filtered out. You can try tweaking this if texture_threshold and the speckle filtering are still letting through spurious matches. |
1 - 20 |
| Texture Threshold | filters out areas that don't have enough texture for reliable matching | >0 (Positive) |
| Number of disparities | How many pixels to slide the window over. The larger it is, the larger the range of visible depths, but more computation is required. |
0-256 & Divisible by 16 |
| Min Disparity | the offset from the x-position of the left pixel at which to begin searching. | -100 - 100 |
| Pre Filter Cap | The pre-filtering phase, which normalizes image brightness and enhances texture in preparation for block matching. Normally you should not need to adjust these. |
1 - 63 |
| Pre Filter Size | The size of the Pre Filter Cap | 5 - 255 & Odd |
Sources:
- https://docs.opencv.org/2.4/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#stereosgbm-stereosgbm
- https://docs.opencv.org/master/dd/d53/tutorial_py_depthmap.html
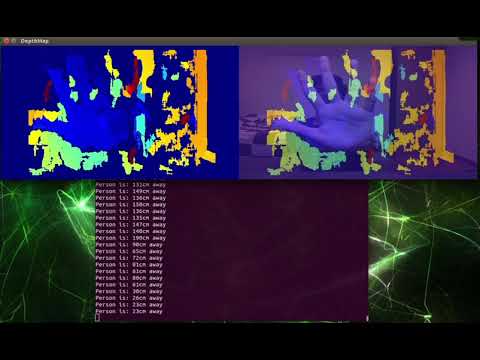
After Calibration and Tuning, we finally have our depth map!
To make things more interesting, I decided to combine a SSD-Mobilenet-v2 model running on TensorRT with this Depth Map. This enables us to determine the distance to people standing in the frame.
Raspberry Pi
Tutorial: https://stereopi.com/blog/opencv-and-depth-map-stereopi-tutorial
GitHub: https://github.com/realizator/stereopi-tutorial
Jetson Hacks - Used to start cameras
Tutorial Video: https://www.youtube.com/watch?v=GQ3drRllX3I
GitHub: https://github.com/JetsonHacksNano/CSI-Camera
Shoutout to my Colleagues at GovTech Singapore for providing support during my internship!