[TOC]
第十五课中我们学习了如何创建光照贴图。光照贴图适用于表现静态光照,阴影效果很不错,但无法处理运动的对象。
阴影贴图是目前(截止2012年)生成动态阴影的最佳方法。阴影贴图的优点是容易实现,缺点是很难完全正确地实现。
本课首先介绍基本算法,探究其缺点,然后进行优化。由于撰写本文时(2012),阴影贴图技术尚属研究热点,因此我们将仅提供一些指导意见,以便您根据需求改善阴影贴图质量。
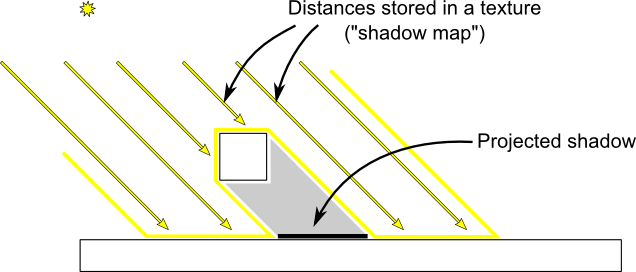
基本的阴影贴图算法需要渲染两遍(pass)。首先,从光源的视角将场景渲染一遍,只计算每个片段的深度。接着从正常的视角把场景再渲染一遍,同时要测试当前片段是否位于阴影中。
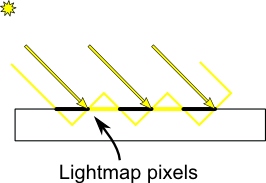
测试某片段是否“位于阴影中”实际上非常简单。如果当前采样点比阴影贴图中的同一点离光源更远,那说明场景中有个物体比当前采样点离光源更近;也就是说,当前片段位于阴影中。
下图可以帮你理解上述原理:
###渲染阴影贴图### 本课只考虑平行光——一种位于无限远处、光线可视为相互平行的光源。因此,我们可以用正交投影矩阵来渲染阴影贴图。正交投影矩阵和透视投影矩阵差不多,只不过未考虑透视——因此无论距离摄像机多远,物体的大小看起来都是一样的。
###设置渲染目标(Render Target)和MVP矩阵### 第十四课中,大家学习了把场景渲染到纹理,并从着色器中访问该纹理。
这里我们采用了一张1024x1024、16- bit深度的纹理来存储阴影贴图。对于阴影贴图来说,16 bit通常绰绰有余;您也可以随便试试别的数值。注意,由于后期还要进行采样,因此我们这里采用的是深度纹理,而非深度缓冲。
// The framebuffer, which regroups 0, 1, or more textures, and 0 or 1 depth buffer.
GLuint FramebufferName = 0;
glGenFramebuffers(1, &FramebufferName);
glBindFramebuffer(GL_FRAMEBUFFER, FramebufferName);
// Depth texture. Slower than a depth buffer, but you can sample it later in your shader
GLuint depthTexture;
glGenTextures(1, &depthTexture);
glBindTexture(GL_TEXTURE_2D, depthTexture);
glTexImage2D(GL_TEXTURE_2D, 0,GL_DEPTH_COMPONENT16, 1024, 1024, 0,GL_DEPTH_COMPONENT, GL_FLOAT, 0);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_NEAREST);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_NEAREST);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_CLAMP_TO_EDGE);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_CLAMP_TO_EDGE);
glFramebufferTexture(GL_FRAMEBUFFER, GL_DEPTH_ATTACHMENT, depthTexture, 0);
glDrawBuffer(GL_NONE); // No color buffer is drawn to.
// Always check that our framebuffer is ok
if(glCheckFramebufferStatus(GL_FRAMEBUFFER) != GL_FRAMEBUFFER_COMPLETE)
return false;MVP矩阵用于从光源的视角渲染场景,其计算过程如下:
- 投影矩阵是正交矩阵,可将整个场景包含到一个AABB(axis-aligned box, 轴向包围盒)里,该包围盒在X、Y、Z轴上的坐标范围分别为(-10,10)、(-10,10)、(-10,20)。这样做是为了让可见的场景始终可见,这一点在“深入研究”一节将有详述。
- 观察矩阵对世界进行了旋转。这样一来,在摄像机空间中,光源的方向就是-Z方向(温故第三课)
- 模型矩阵可设为任意值。
glm::vec3 lightInvDir = glm::vec3(0.5f,2,2);
// Compute the MVP matrix from the light's point of view
glm::mat4 depthProjectionMatrix = glm::ortho<float>(-10,10,-10,10,-10,20);
glm::mat4 depthViewMatrix = glm::lookAt(lightInvDir, glm::vec3(0,0,0), glm::vec3(0,1,0));
glm::mat4 depthModelMatrix = glm::mat4(1.0);
glm::mat4 depthMVP = depthProjectionMatrix * depthViewMatrix * depthModelMatrix;
// Send our transformation to the currently bound shader,
// in the "MVP" uniform
glUniformMatrix4fv(depthMatrixID, 1, GL_FALSE, &depthMVP[0][0])###着色器### 这次渲染中所用的着色器很简单。顶点着色器仅仅简单地计算一下齐次坐标系(homogeneous coodinates)中的顶点位置:
#version 330 core
// Input vertex data, different for all executions of this shader.
layout(location = 0) in vec3 vertexPosition_modelspace;
// Values that stay constant for the whole mesh.
uniform mat4 depthMVP;
void main(){
gl_Position = depthMVP * vec4(vertexPosition_modelspace,1);
}片段着色器同样简单:只需将片段的深度值写到location 0(即写入深度纹理)。
#version 330 core
// Ouput data
layout(location = 0) out float fragmentdepth;
void main(){
// Not really needed, OpenGL does it anyway
fragmentdepth = gl_FragCoord.z;
}渲染阴影贴图比渲染一般的场景要快一倍多,这是因为只需写入低精度的深度值,不需要同时写深度和颜色。显存带宽往往是影响GPU性能的关键因素。
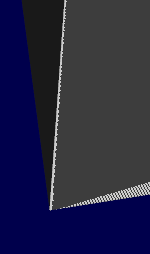
###结果### 渲染出的纹理如下图所示:
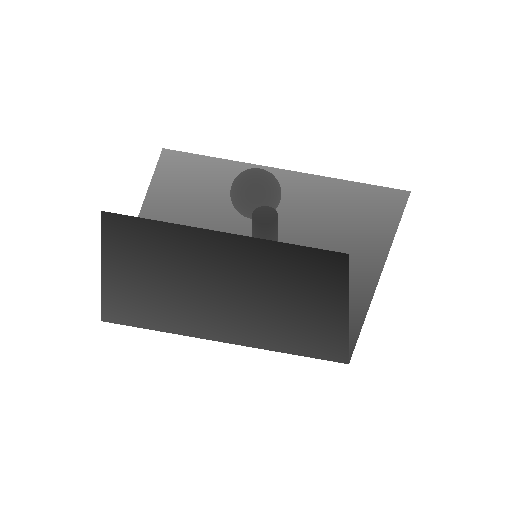
颜色越深表示z值越小;由此可见,墙面的右上角离摄像机更近。反之,白色表示z=1(齐次坐标系中的值),离摄像机十分遥远。
###基本着色器### 现在回到普通的着色器。对于每个计算出的片段,都要测试其是否位于阴影贴图之“后”。
为了进行这个测试,我们需要计算当前片段在创建阴影贴图时所用的空间中的坐标。因此要分别用通常的MVP矩阵和depthMVP矩阵对其做变换。
不过,这里还需要一些技巧。将depthMVP与顶点坐标相乘得到的是齐次坐标系中的坐标,坐标范围为[-1,1],而纹理采样的取值范围则为[0,1]。
举个例子,位于屏幕中央的片段的齐次坐标应该是(0,0);但要对纹理中心进行采样,UV坐标就应该是(0.5,0.5)。
这个问题可以通过在片段着色器中调整采样坐标来修正,但用如下这个矩阵去乘齐次坐标则更为高效。这个矩阵将坐标除以2(主对角线上[-1,1] -> [-0.5, 0.5]),然后平移(最后一行[-0.5, 0.5] -> [0,1])。
glm::mat4 biasMatrix(
0.5, 0.0, 0.0, 0.0,
0.0, 0.5, 0.0, 0.0,
0.0, 0.0, 0.5, 0.0,
0.5, 0.5, 0.5, 1.0
);
glm::mat4 depthBiasMVP = biasMatrix*depthMVP;现在可以着手写顶点着色器了。这个顶点着色器与以往的基本相同,不过这次要输出两个坐标。
gl_Position是当前摄像机所在坐标系下的顶点坐标ShadowCoord是上一个摄像机(光源)所处坐标系下的顶点坐标
// Output position of the vertex, in clip space : MVP * position
gl_Position = MVP * vec4(vertexPosition_modelspace,1);
// Same, but with the light's view matrix
ShadowCoord = DepthBiasMVP * vec4(vertexPosition_modelspace,1);片段着色器就很简单了:
texture2D( shadowMap, ShadowCoord.xy ).z是光源到距离最近的遮挡物之间的距离。ShadowCoord.z是光源和当前片段之间的距离
……因此,若当前片段比最近的遮挡物还远,那意味着这个片段位于(这个最近的遮挡物的)阴影中
float visibility = 1.0;
if ( texture2D( shadowMap, ShadowCoord.xy ).z < ShadowCoord.z){
visibility = 0.5;
}在光照计算中实现上述原理即可。当然,环境光分量无需改动,毕竟这只分量是个为了模拟一些光亮,让即使处在阴影或黑暗中的物体也能显出轮廓来(否则就会是纯黑色)。
color =
// Ambiant : simulates indirect lighting
MaterialAmbiantColor +
// Diffuse : "color" of the object
visibility * MaterialDiffuseColor * LightColor * LightPower * cosTheta+
// Specular : reflective highlight, like a mirror
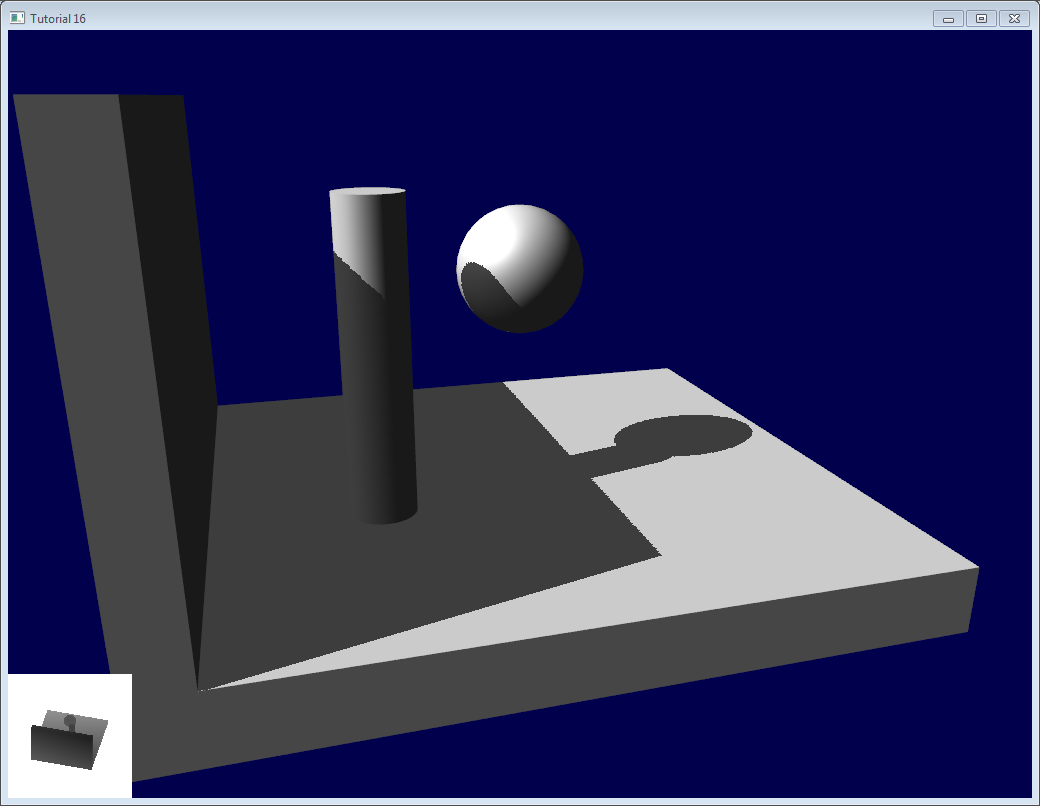
visibility * MaterialSpecularColor * LightColor * LightPower * pow(cosAlpha,5);###结果——阴影瑕疵(Shadow acne)###
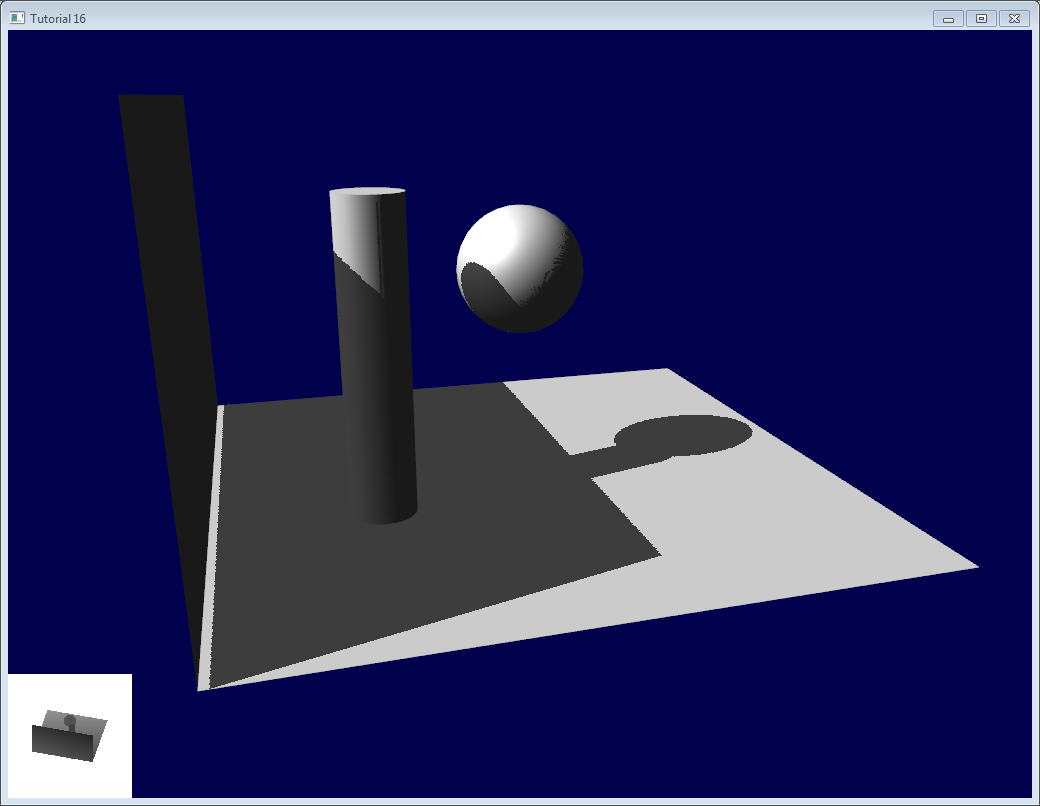
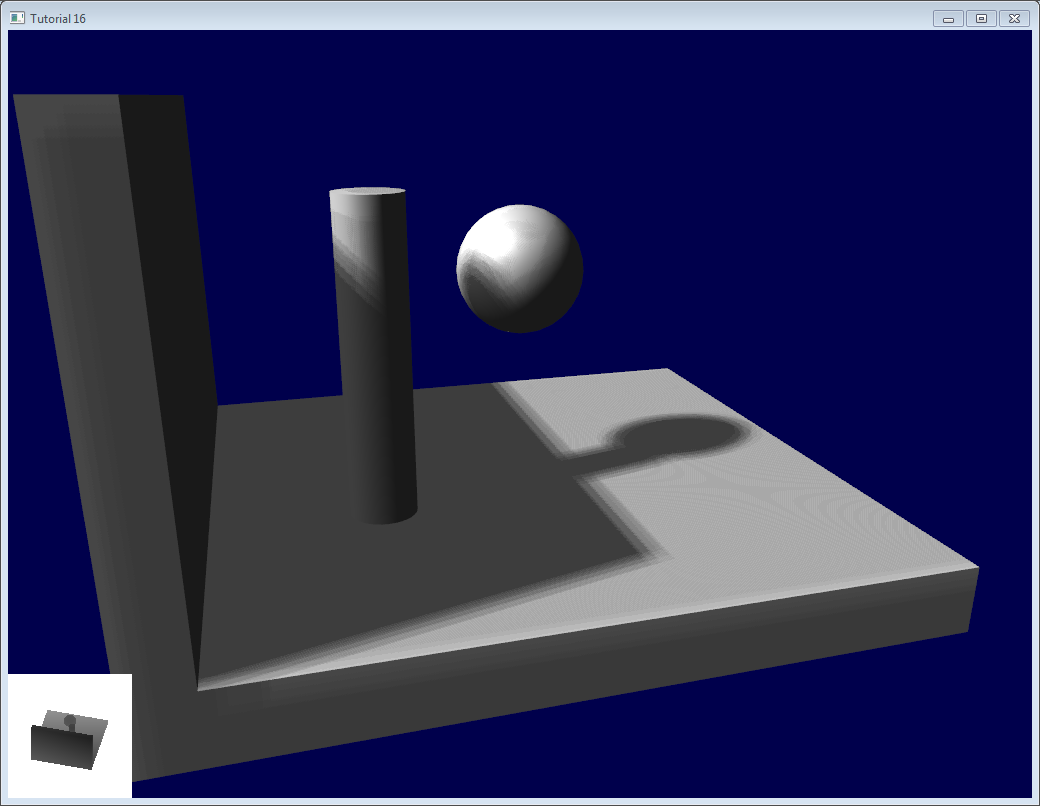
这是目前的代码渲染的结果。很明显,大体的思想是实现了,不过质量不尽如人意。
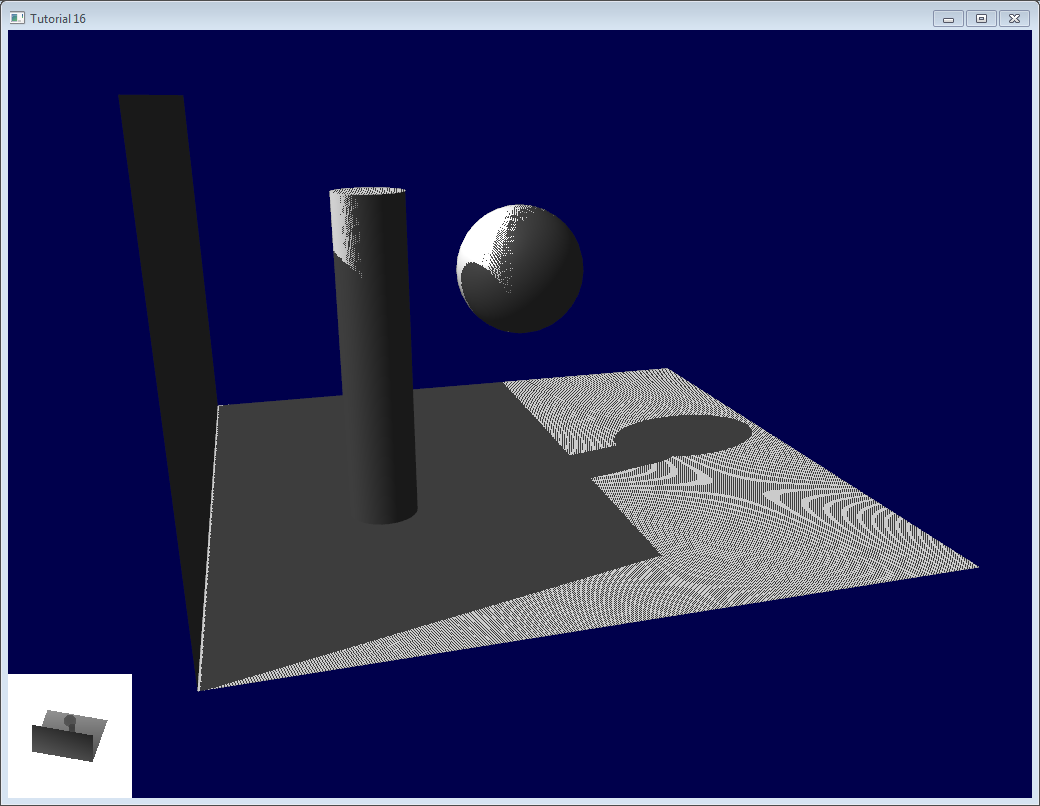
接下来我们逐一检查图中的问题。代码有两个工程:shadowmaps和shadowmaps_simple。simple版的效果和上图一样糟糕,但代码比较容易理解。
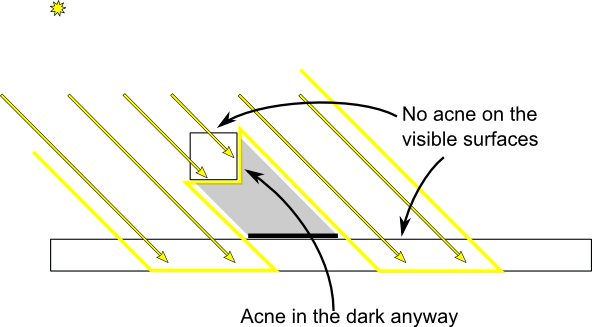
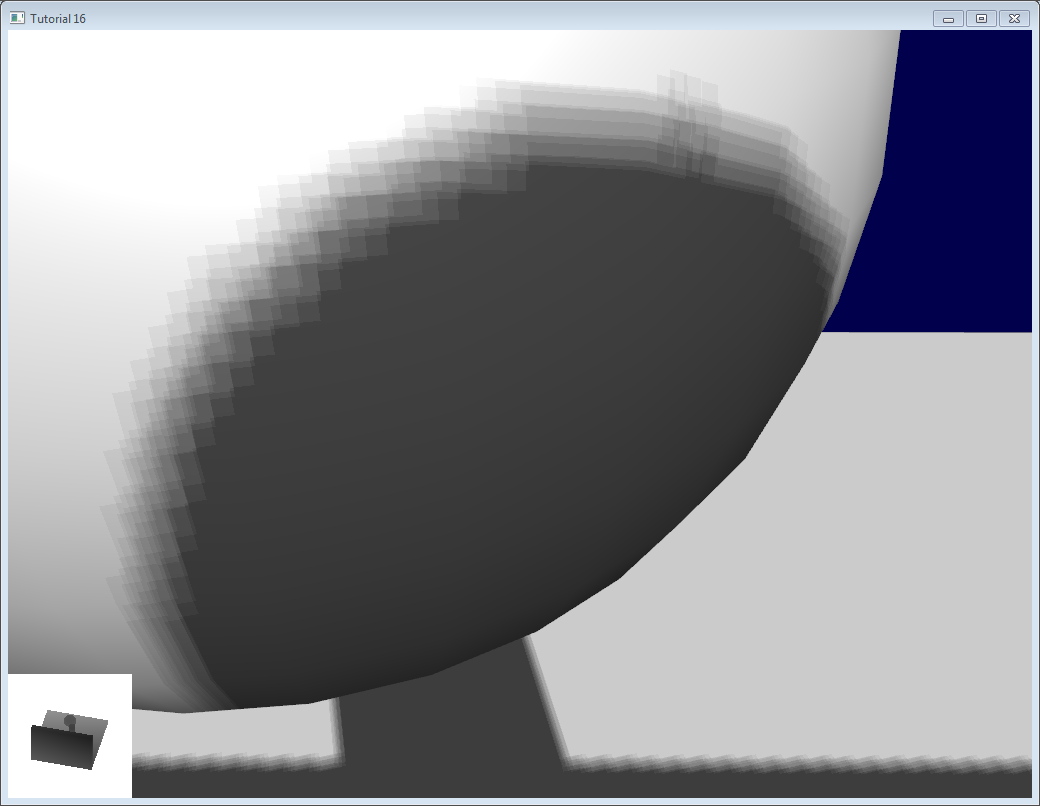
###阴影瑕疵### 最明显的问题就是阴影瑕疵:
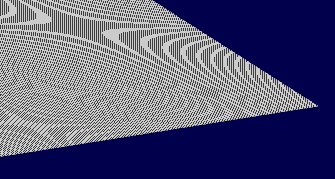
下面这张简图可以解释这种现象:
通常的“补救措施”是加上一个误差容限(error margin):仅当当前片段的深度(再次提醒,这里指的是从光源的视角得到的深度值)比光照贴图像素的深度要大得多时,才将其判定为阴影。这可以通过添加一个偏差(bias)来办到:
float bias = 0.005;
float visibility = 1.0;
if ( texture2D( shadowMap, ShadowCoord.xy ).z < ShadowCoord.z-bias){
visibility = 0.5;
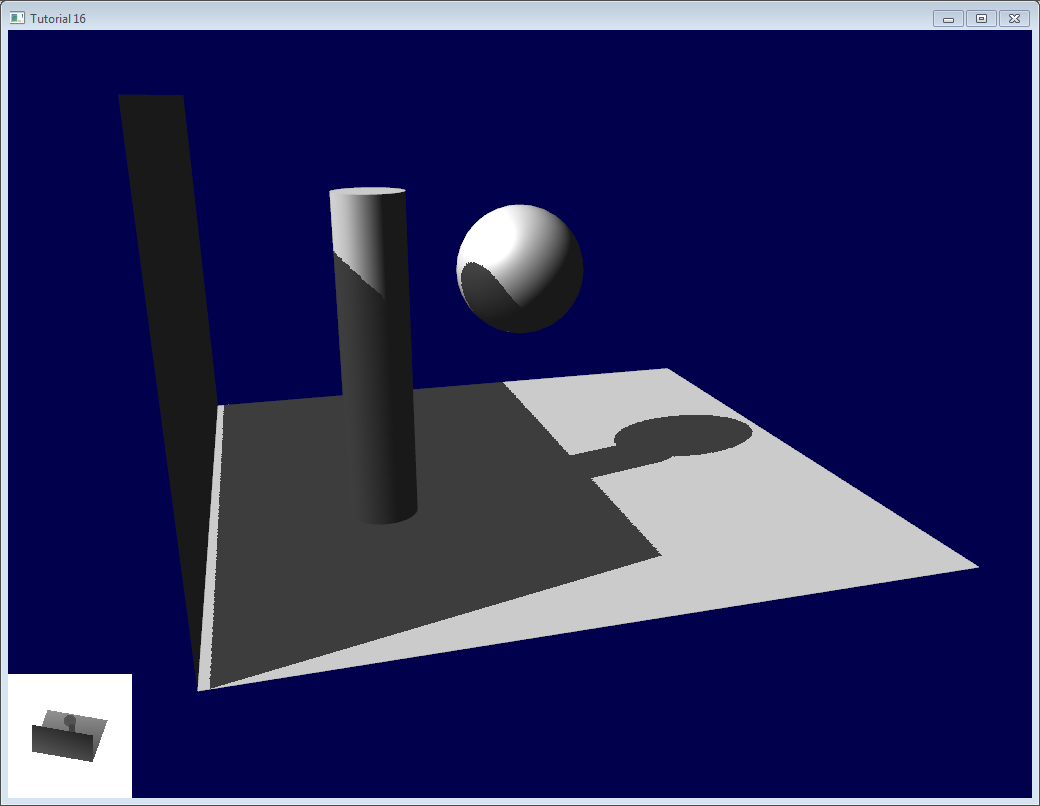
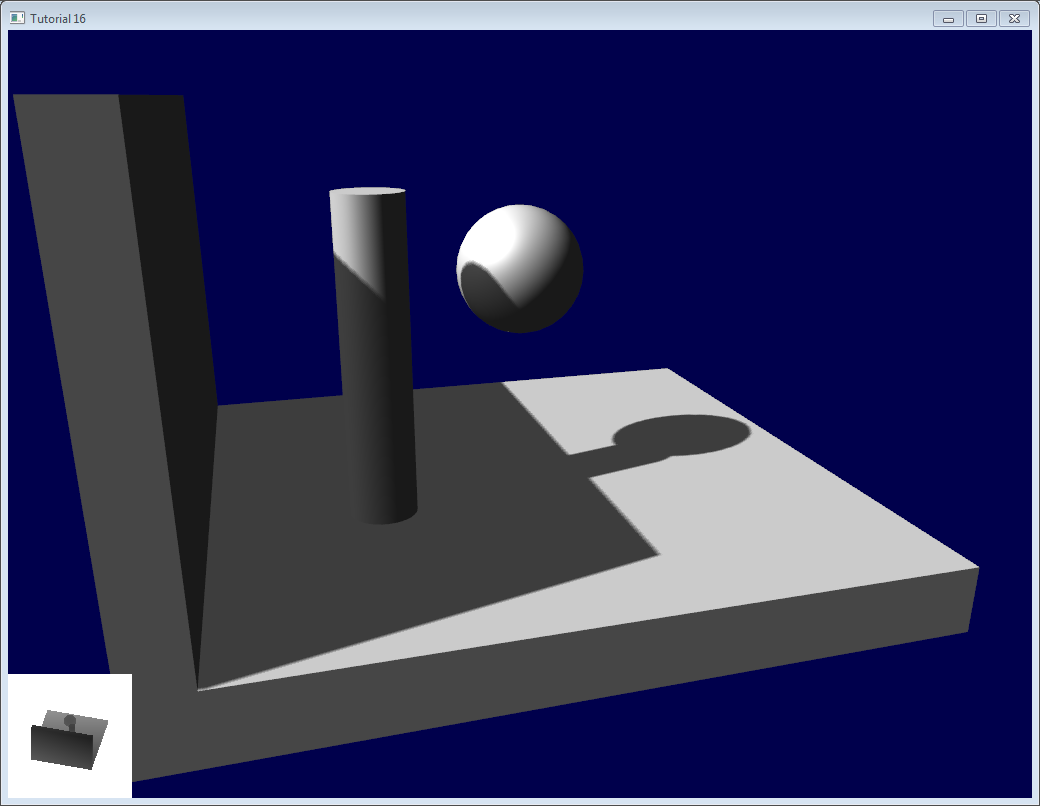
}效果好多了::
不过,您也许注意到了,由于加入了偏差,墙面与地面之间的瑕疵显得更加明显了。更糟糕的是,0.005的偏差对地面来说太大了,但对曲面来说又太小了:圆柱体和球体上的瑕疵依然可见。
一个通常的解决方案是根据斜率调整偏差:
float bias = 0.005*tan(acos(cosTheta)); // cosTheta is dot( n,l ), clamped between 0 and 1
bias = clamp(bias, 0,0.01);阴影瑕疵消失了,即使在曲面上也看不到了。
还有一个技巧,不过这个技巧是否奏效得看具体的几何形状。此技巧只渲染阴影中的背面。这就对厚墙的几何形状提出了硬性要求(请看下一节——彼得潘现象(Peter Panning),不过即使有瑕疵,也只会出现在阴影遮蔽下的表面上。[译者注:在迪斯尼经典动画《小飞侠》中,小飞侠彼得·潘的影子和身体分开了,小仙女温蒂又给他缝好了。]
渲染阴影贴图时剔除正面的三角形:
// We don't use bias in the shader, but instead we draw back faces,
// which are already separated from the front faces by a small distance
// (if your geometry is made this way)
glCullFace(GL_FRONT); // Cull front-facing triangles -> draw only back-facing triangles渲染场景时正常地渲染(剔除背面)
glCullFace(GL_BACK); // Cull back-facing triangles -> draw only front-facing triangles除了使用“偏差”,代码中也采用了上述剔除正面或背面的方法。
###彼得潘现象(Peter Panning)### 现在没有阴影瑕疵了,但地面的光照效果还是不对劲,墙面看上去好像悬在半空(因此术语称为“彼得潘现象”)。实际上,加上偏差会加剧阴影悬空。
这个问题很好修复:避免使用薄的几何形体就行了。这样做有两个好处:
- 首先,(把物体增厚)解决了阴影悬空问题:物体比偏差值要大得多,于是一切麻烦烟消云散了
- 其次,可在渲染光照贴图时启用背面剔除,因为现在,墙壁上有一个面面对着光源,这样就可以遮挡住墙壁的另一面,而这另一面恰好作为背面被剔除了,无需渲染。
缺点就是要渲染的三角形增多了(每帧的三角形数量翻倍!)
###锯齿### 即使是使用了这些技巧,你还是会发现阴影的边缘上有一些锯齿。换句话说,就是一个像素点是白的,邻近的一个像素点是黑的,中间缺少平滑过渡。

###PCF(percentage closer filtering,百分比渐近过滤)###
一个最简单的改进方法是把阴影贴图的sampler类型改为**sampler2DShadow**。这么做的结果是,每当对阴影贴图进行一次采样时,硬件就会对相邻的纹素进行采样,并对这些相邻纹素全部进行比较,将比较结果做双线性过滤后返回一个[0,1]之间的浮点数。
例如,0.5即表示有两个采样点在阴影中,两个采样点在光照中。
要注意把这个和“对过滤后的深度贴图进行单次采样“区别开来!单后者只进行一次“比较”,返回的是true或false;而PCF返回的是4个“true或false”值的插值结果。

可以看到,阴影边界平滑了,但阴影贴图的纹素依然可见。
###泊松采样(Poisson Sampling)### 一个简易的解决办法是对阴影贴图做N次采样(而不是只做一次),并且要和PCF组合使用。这样即使采样次数不多,也可以得到较好的效果。下面是四次采样的代码:
for (int i=0;i<4;i++){
if ( texture2D( shadowMap, ShadowCoord.xy + poissonDisk[i]/700.0 ).z < ShadowCoord.z-bias ){
visibility-=0.2;
}
}poissonDisk是一个常量数组,其定义如下:
vec2 poissonDisk[4] = vec2[](
vec2( -0.94201624, -0.39906216 ),
vec2( 0.94558609, -0.76890725 ),
vec2( -0.094184101, -0.92938870 ),
vec2( 0.34495938, 0.29387760 )
);这样,随着阴影贴图采样点个数增多或减少,生成的片段会随之变亮或变暗。
常量700.0确定了采样点的“分散”程度。散得太密,还是会出现锯齿;散得太开,则会出现条带(banding)(截图中未使用PCF,以使条带现象更明显;其中做了16次采样)
###分层泊松采样(Stratified Poisson Sampling)### 通过为每个像素分配不同采样点个数,我们可以消除这一问题。主要有两种方法:分层泊松法(Stratified Poisson)和旋转泊松法(Rotated Poisson)。分层泊松法选择不同的采样点数;旋转泊松法采样点数保持一致,但会做随机的旋转以使采样点的分布发生变化。本课仅对分层泊松法作介绍。
与之前版本唯一不同的是,这里用了一个随机数来索引poissonDisk:
for (int i=0;i<4;i++) {
int index = // A random number between 0 and 15, different for each pixel (and each i !)
visibility -= 0.2*(1.0-texture( shadowMap, vec3(ShadowCoord.xy + poissonDisk[index]/700.0, (ShadowCoord.z-bias)/ShadowCoord.w) ));
}可用如下代码(返回一个[0,1]间的随机数)产生随机数
float dot_product = dot(seed4, vec4(12.9898,78.233,45.164,94.673));
return fract(sin(dot_product) * 43758.5453);本例中,seed4是参数i和seed的组成的vec4向量(这样才会是在4个位置做采样)。参数seed的值可以选用gl_FragCoord(像素的屏幕坐标),或者Position_worldspace:
// - A random sample, based on the pixel's screen location.
// No banding, but the shadow moves with the camera, which looks weird.
int index = int(16.0*random(gl_FragCoord.xyy, i))%16;
// - A random sample, based on the pixel's position in world space.
// The position is rounded to the millimeter to avoid too much aliasing
//int index = int(16.0*random(floor(Position_worldspace.xyz*1000.0), i))%16;这样做之后,上图中的那种条带就消失了,不过噪点却显现出来了。不过,“漂亮的”噪点可比上面那些条带“好看”多了。
上述三个例子的实现请参考tutorial16/ShadowMapping.fragmentshader。
即使把这些技巧都用上,阴影质量仍有提升空间。下面是一些最常见的方法:
###Early bailing### 采样次数16太大,其实4次采样就够了。若这四个点都在光照或都在阴影中,那就算做16次采样效果也一样:这就是early bailing的基本出发点。若这些采样点明暗各异,那你很可能位于阴影边界上,这时候进行16次采样才是合情理的。
###聚光灯(Spot lights)### 处理聚光灯这种光源时,不需要多大的改动。最主要的是:把正交投影矩阵换成透视投影矩阵:
glm::vec3 lightPos(5, 20, 20);
glm::mat4 depthProjectionMatrix = glm::perspective<float>(45.0f, 1.0f, 2.0f, 50.0f);
glm::mat4 depthViewMatrix = glm::lookAt(lightPos, lightPos-lightInvDir, glm::vec3(0,1,0));大部分步骤都一样,只不过用的不是正交平截头体(orthographic frustum),而是透视平截头体(perspective frustum)。考虑到透视除法,采用了texture2Dproj。(见“第四课——矩阵”的脚注)
第二步,在着色时把透视效果考虑进来。(见“第四课——矩阵”的脚注。简而言之,透视投影矩阵根本就没做什么透视。产生透视效果————将投影的坐标除以w是由硬件完成的。这里,我们在着色器中模拟这一过程,自己做透视除法。顺便说一句,正交矩阵产生的齐次向量w始终为1,这就是为什么正交矩阵没有任何透视效果。)
用GLSL完成此操作主要有两种方法。第二种方法利用了内置的textureProj函数,但两种方法得出的效果是一样的。
if ( texture( shadowMap, (ShadowCoord.xy/ShadowCoord.w) ).z < (ShadowCoord.z-bias)/ShadowCoord.w )
if ( textureProj( shadowMap, ShadowCoord.xyw ).z < (ShadowCoord.z-bias)/ShadowCoord.w )###点光源(Point lights)### 大部分步骤是一样的,不过点光源需要深度立方体贴图(cubemap)。立方体贴图包含一组6个纹理,每个纹理位于立方体的一面,无法用标准的UV坐标访问,只能用一个代表方向的三维向量来访问。
这个cubemap保存着空间各个方向的深度,保证点光源各方向都能投射影子。
###多光源组合### 该算法可以处理多个光源,但别忘了每个光源都要做一次渲染,以生成其阴影贴图。这些计算极大地消耗了显存,也许很快您的显卡带宽就吃紧了。
###自动光源平截头体(Automatic light frustum)### 本课中,囊括整个场景的光源平截头体是手动算出来的。虽然在本课的限定条件下,这么做还行得通,但应该避免这样的做法。如果你的地图大小是1Km x 1Km,你的阴影贴图大小为1024x1024,则每个纹素代表的面积为1平方米。这么做太蹩脚了。光源的投影矩阵应尽量紧包整个场景。
对于聚光灯来说,只需调整一下范围就行了。
对于太阳这样的方向光源,情况就复杂一些:光源确实照亮了整个场景。以下是计算方向光源平截头体(light frustum)的一种方法:
潜在阴影接收者(Potential Shadow Receiver,PSR)。PSR是这样一种物体——它们同时在光源平截头体(light frustum)、观察平截头体(view frustum)、场景包围盒三者之内。顾名思义,PSR都有可能位于阴影中:摄像机和光源都可能“看”到它。
潜在阴影投射者(Potential Shadow Caster,PSC)= PSR + 所有位于PSR和光源之间的物体(一个物体可能不可见但仍然会投射出一条可见的阴影)。
因此,要计算光源的投影矩阵,可以用所有可见的物体,“减去”那些离得太远的物体,再计算其包围盒;然后“加上”位于包围盒与广元之间的物体,再次计算新的包围盒(不过这次是沿着光源的方向)。
这些集合的精确计算涉及凸包体的求交计算,但这个方法(计算包围盒)实现起来简单多了。
在物体从平截头体中消失时,此法计算量会陡增,原因在于阴影贴图的分辨率陡然增加了。这一点可以通过多次平滑插值来弥补。CSM(Cascaded Shadow Map,层叠阴影贴图法)没有这个问题,但实现起来较难。
###指数阴影贴图(Exponential shadow map)### 指数阴影贴图法试图借助“位于阴影中的、但离光源较近的片段实际上处于‘某个中间位置’”这一假设来减少锯齿。这个方法涉及到偏差,不过测试已不再是二元的:片段离明亮曲面的距离越远,显得越黑暗。
显然,这纯粹是一种障眼法,两物体重叠时,瑕疵就会显露出来。
###LiSPSM(Light-space perspective Shadow Map,光源空间透视阴影贴图)### LiSPSM调整了光源投影矩阵,从而在离摄像机很近时获取更高的精度。这一点在“双平截头体(duelling frustra)”现象发生时显得尤为重要。所谓“duelling frustra”是指:点光源与你(摄像机)距离远,点光源“视线”方向又恰好与您的视线方向相反。离光源近的地方(即离你远的地方),阴影贴图精度高;离光源远的地方(即离您近、最需要精确阴影贴图的地方),阴影贴图的精度却又恰恰不够。[译者注:frustra是frustum的复数形式。]
不过LiSPSM实现起来很难。详细的实现方法请看参考文献。
CSM(Cascaded shadow map,层叠阴影贴图) CSM和LiSPSM解决的问题相同,但方式有所区别。CSM仅对观察视域平截头体的各部分使用了2~4个标准阴影贴图。第一个阴影贴图处理近处的物体,所以在近处这块小区域内,可以获得很高的精度。随后几个阴影贴图处理远一些的物体。最后一个阴影贴图处理场景中的很大一部分,但由于透视效应,视觉感受上没有近处区域那么明显。
撰写本文时,CSM是性价比最好的方法。很多案例都选用了这一解决方案。
正如您所看到的,阴影贴图技术是个很复杂的课题。每年都有新的方法和改进方案发表,但目前为止尚无完美的解决方案。
幸运的是,大部分方法都可以混合使用:在LiSPSM中使用CSM,再加PCF平滑等等是完全可行的。尽情地实验吧。
总结一句,我建议您尽可能坚持使用预计算的光照贴图(lightmap),只对动态物体使用阴影贴图。并且要确保两者的视觉效果协调一致,任何一者效果太好/太坏都不合适。
Written with Cmd Markdown.