Possible ways to improve the accuracy of GT #35
Comments
|
Code is as follows. |
|
@qiaozhijian thanks for your effort and advice on this dataset. We are trying to reproduce the problem and fix it. In fact, 3D lanes filter by projection, consistent with the your second way, have been applied. Due to the interpolation operation, some outlier points error may be caused. |
|
Refer to the issue 31, it may causes this problem. In new openlane, this problem will be effectively improved. |
Thanks, Ricard Lee. I agree with you that coordinate system may cause this problem. But better yet, check whether this problem is solved using new openlane referring to my code. I know producing GT, especially for far lane points, is very difficult and of a lot work. So, feel free! |
|
@qiaozhijian Thansk , before release, we will check this problem again. |
|
I'm sorry that I had a mistake in my code. |
I accumulate the 3D lane GT using pose provided by origin waymo dataset. I find there is a serious blur of accumulated 3D submap in the segment(segment-9568394837328971633_466_365_486_365_with_camera_labels).

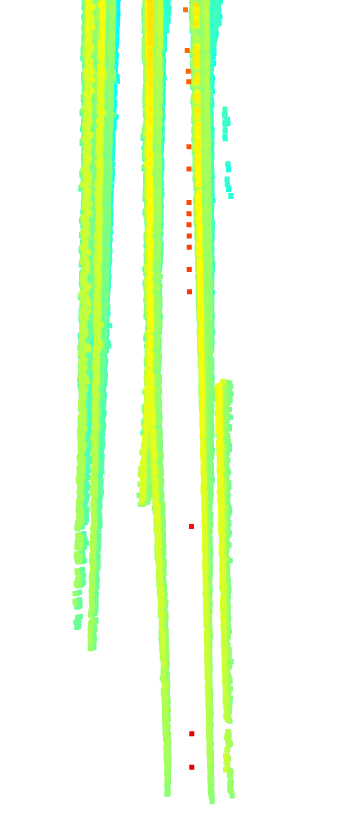

Let's look at the first small section of this submap. There are even some outliers such as red points.
For easy understanding, the corresponding images are as follows
I think there are two ways to improve the quality of map:
First, use only the closer lane points. For example, 20m
Second, fit the 3D lanes again in the submap and project them to every frame.
The text was updated successfully, but these errors were encountered: