{kind=link}
{kind=link}
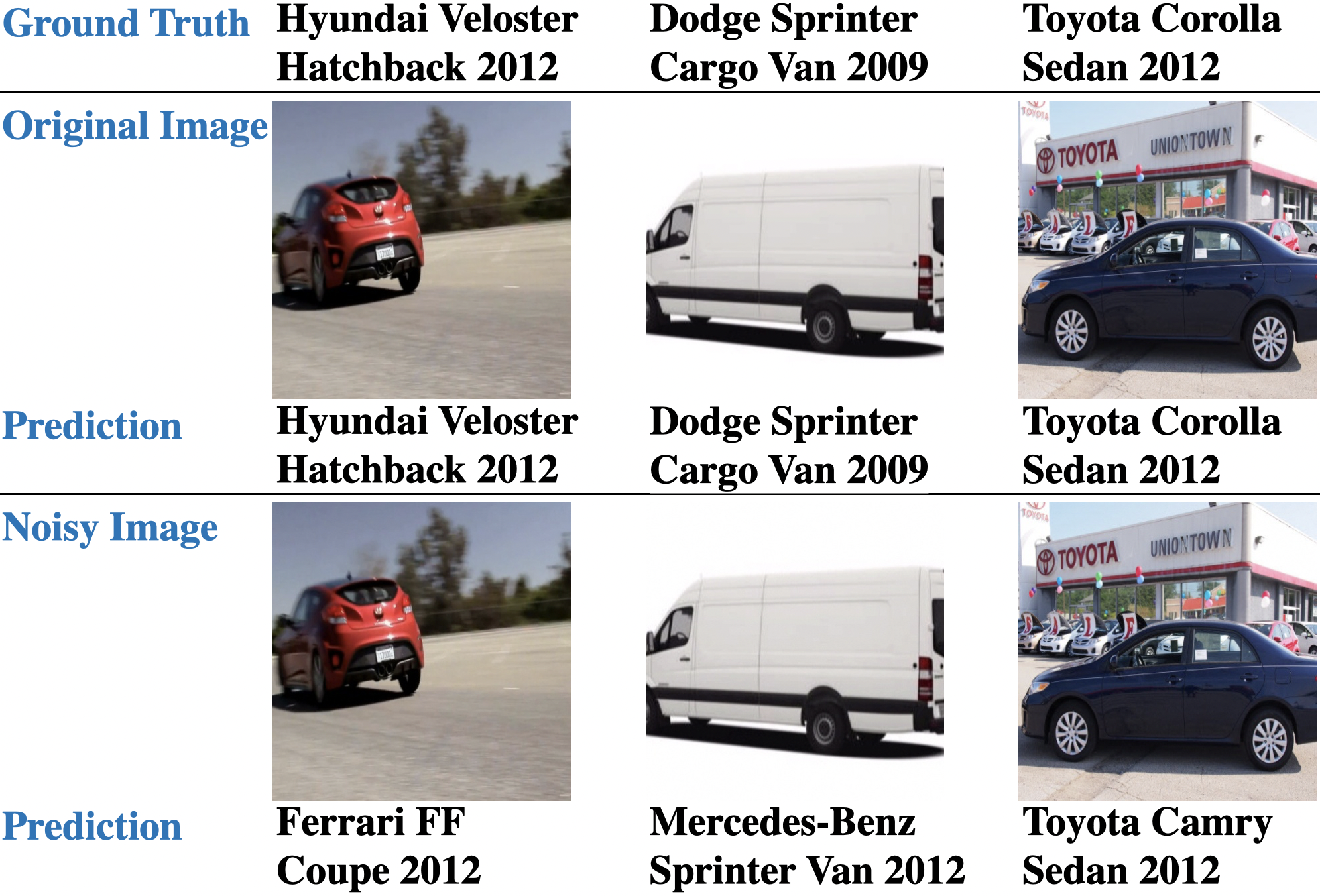
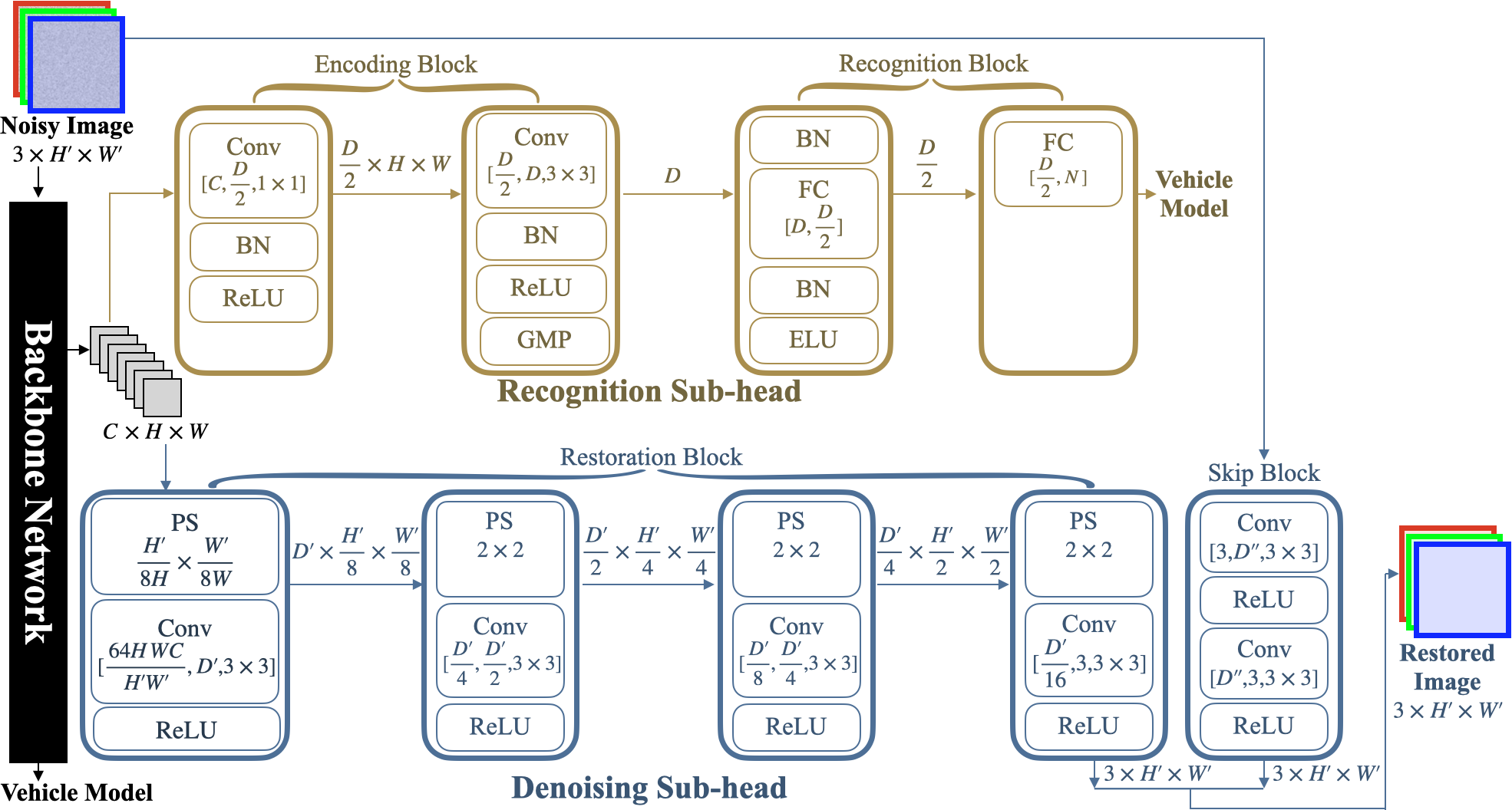
This repository provides a PyTorch implementation of the fine-grained vehicle recognition method, as proposed in my paper: Progressive Multi-Task Anti-Noise Learning and Distilling Frameworks for Fine-Grained Vehicle Recognition.
This source code was tested in the following environment:
Python = 3.8.13
PyTorch = 1.12.0
torchvision = 0.13.0
Ubuntu 20.04.6 LTS
NVIDIA GeForce RTX 3080 Ti
The pre-trained models can be downloaded from this link.
Please save the downloaded models in the weightsFromCloud folder.
The xxxxx_Network.pth file was saved using torch.save(model, 'xxxxx_Network.pth').
The xxxxx_Weight.pth file was saved using torch.save(model.state_dict(), 'xxxxx_Weight.pth').
If you decide to register on InfiniCLOUD to download the model, I would appreciate it if you could kindly use my referral code XTQQJ during the process. This small gesture will be of great help to me.
- (1) Installation
Install Inplace-ABN following the instructions:
https://github.com/Alibaba-MIIL/TResNet/blob/master/requirements.txt
https://github.com/Alibaba-MIIL/TResNet/blob/master/INPLACE_ABN_TIPS.md
Install imgaug:
pip install imgaug
- (2) Download
Download the folder src from https://github.com/Alibaba-MIIL/TResNet,
the folder vic from https://github.com/styler00dollar/pytorch-loss-functions,
the folder example and Python file sam.py from https://github.com/davda54/sam,
and save them as:
Anti-noise_FGVR
├── basic_conv.py
├── Inference_Stanford_Cars_ResNet50_Student.py
├── Inference_Stanford_Cars_ResNet50_Teacher.py
├── ...
├── src
├── vic
├── example
├── sam.py
Alternatively, you can simply download by running the following commands (note that subversion should be installed beforehand as sudo apt install subversion):
git clone https://github.com/Dichao-Liu/Anti-noise_FGVR.git
cd Anti-noise_FGVR
svn export https://github.com/Alibaba-MIIL/TResNet/branches/master/src
svn export https://github.com/davda54/sam/branches/main/example
svn export https://github.com/davda54/sam/branches/main/sam.py
svn export https://github.com/styler00dollar/pytorch-loss-functions/branches/main/vic
- (1) Download the Stanford Cars dataset or other datasets mentioned in the paper, and organize the structure as follows:
dataset folder
├── train
│ ├── class_001
| | ├── 1.jpg
| | ├── 2.jpg
| | └── ...
│ ├── class_002
| | ├── 1.jpg
| | ├── 2.jpg
| | └── ...
│ └── ...
└── test
├── class_001
| ├── 1.jpg
| ├── 2.jpg
| └── ...
├── class_002
| ├── 1.jpg
| ├── 2.jpg
| └── ...
└── ...
- (2) modify the path to the dataset folders.
python Stanford_Cars_ResNet50_PMAL.py
python Stanford_Cars_ResNet50_Distillation.py
When training the student network, the --from_local option allows you to specify whether to use the teacher model downloaded from InfiniCLOUD or a model you have trained yourself using the provided code.
python Inference_Stanford_Cars_ResNet50_Teacher.py
python Inference_Stanford_Cars_ResNet50_Student.py
@ARTICLE{10623841,
author={Liu, Dichao},
journal={IEEE Transactions on Intelligent Transportation Systems},
title={Progressive Multi-Task Anti-Noise Learning and Distilling Frameworks for Fine-Grained Vehicle Recognition},
year={2024},
volume={25},
number={9},
pages={10667-10678},
keywords={Noise;Task analysis;Image recognition;Multitasking;Training;Noise measurement;Accuracy;Fine-grained vehicle recognition;intelligent transportation systems;ConvNets;object recognition},
doi={10.1109/TITS.2024.3420151}
}