Home
Welcome to the DynamicSemanticMapping wiki!
- (3/18) Choose a sequence of data with the most information and collect input information. * (3/18) Develop the project base code to extract information from our data. * (3/18) Define the data structures for our voxel-based 3D map presentation.
- (3/25) Decide voxel map representation and develop basic operators for map update.
- (3/25) Visualize the voxel semantic map using OpenSceneGraph or PCL.
-
(Done, Lu) Implement SemanticOcTree and basic functions.
-
(Done, Lu) Implement Extra Information fusion, including color and semantics. Color fusion tested on Stanford 2D-3D-Semantics Dataset (2D-3D-S).


-
(Done, Lu) Implement Semantics fusion, and encode semantics into color for final visualization.
-
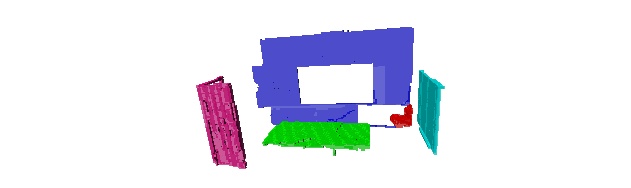
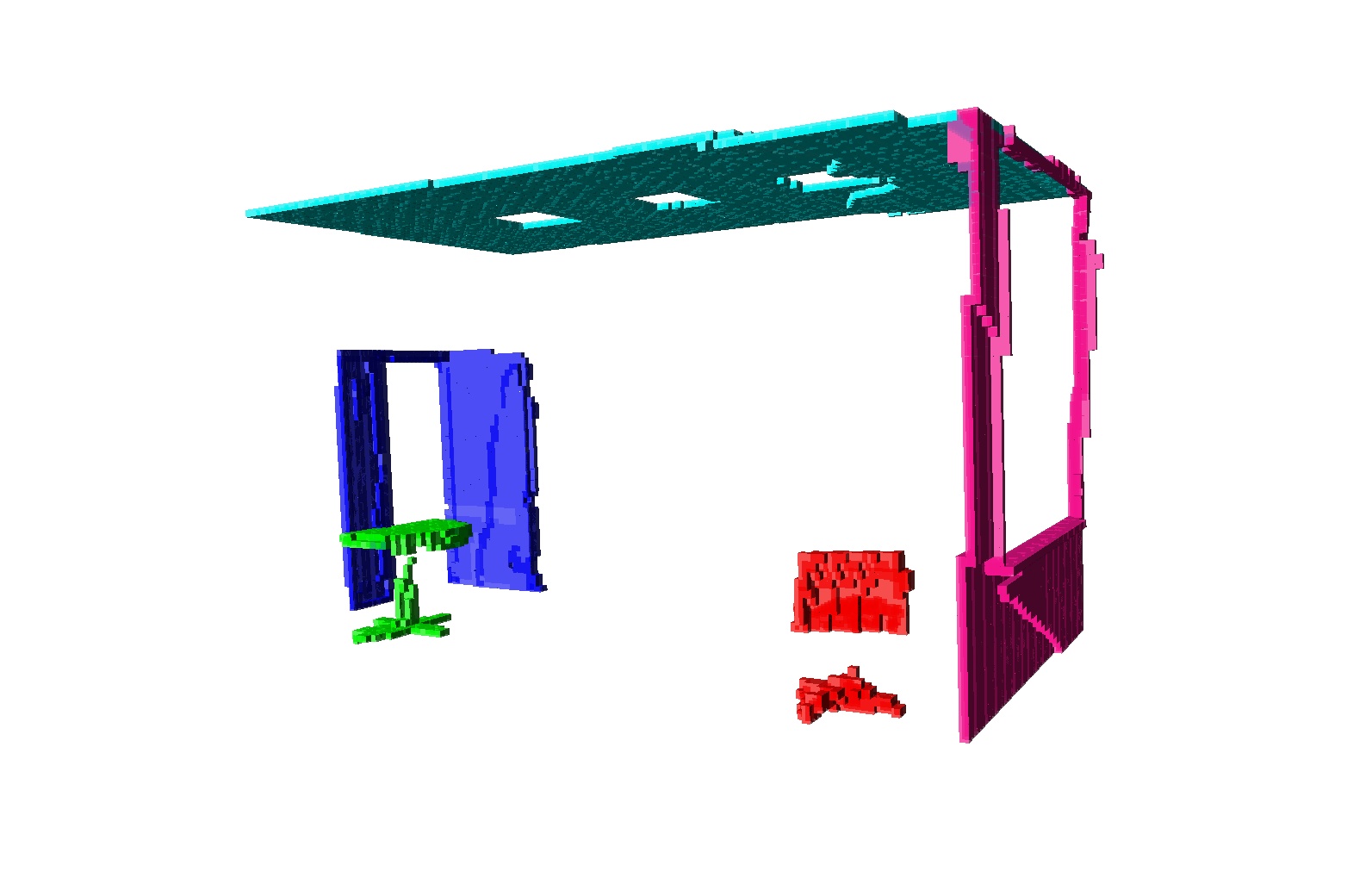
(Done, Lu) Test SemanticOcTree for five classes: chair, table, door, wall, board(celling), works fine.