<joint> <axis> not working correctly in combination with <include> inside <model> (nested model) in sdf >= 1.5 unless old behaviour (sdf <= 1.4) is restored via <use_parent_model_frame> #2401
Comments
|
Original comment by Andreas Bihlmaier (Bitbucket: andreasBihlmaier).
|
1 similar comment
|
Original comment by Andreas Bihlmaier (Bitbucket: andreasBihlmaier).
|
|
Original comment by Steve Peters (Bitbucket: Steven Peters, GitHub: scpeters). It looks like your example is using nested models. I think the joint axis is being interpreted correctly if a model is |
|
Original comment by Andreas Bihlmaier (Bitbucket: andreasBihlmaier).
|
|
Original comment by Andreas Bihlmaier (Bitbucket: andreasBihlmaier). @scpeters Yes, this issue only pertains to inside a tag. I updated the title accordingly. |
|
Original comment by Guilherme Carvalho (Bitbucket: guilhermepscarvalho). ping! Was this solved in Gazebo 9? |
|
Original comment by Andreas Bihlmaier (Bitbucket: andreasBihlmaier). Running gazebo9 9.4.1-1~bionic I cannot use the "Demo Joint Types" model anymore: |

|
Original comment by Andreas Bihlmaier (Bitbucket: andreasBihlmaier). Issue still persists: |

|
Original comment by Shane Loretz (Bitbucket: Shane Loretz, GitHub: sloretz).
Gazebo 9 is unable to load |
Original report (archived issue) by Andreas Bihlmaier (Bitbucket: andreasBihlmaier).
The original report had attachments: broken_joint_axis_include_demo.tgz
Hi everyone,
I found an issue regarding the "new" (SDF >= 1.5) behavior of in combination with :
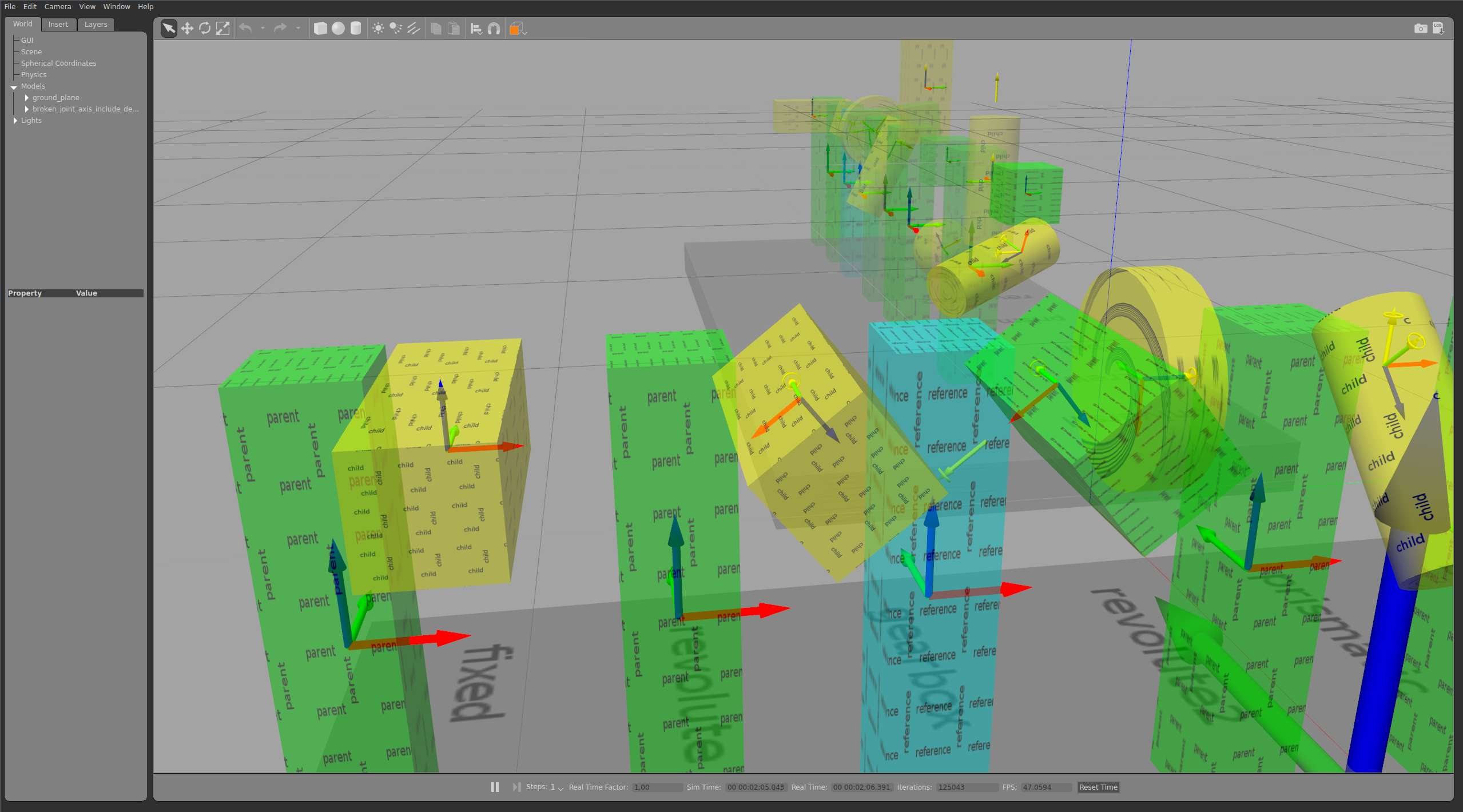
The axis of all models that are d with a are wrong. To be more precise, it appears that they do not take the into account and thus turn up wrong with respect to all other coordinate systems in the d model.
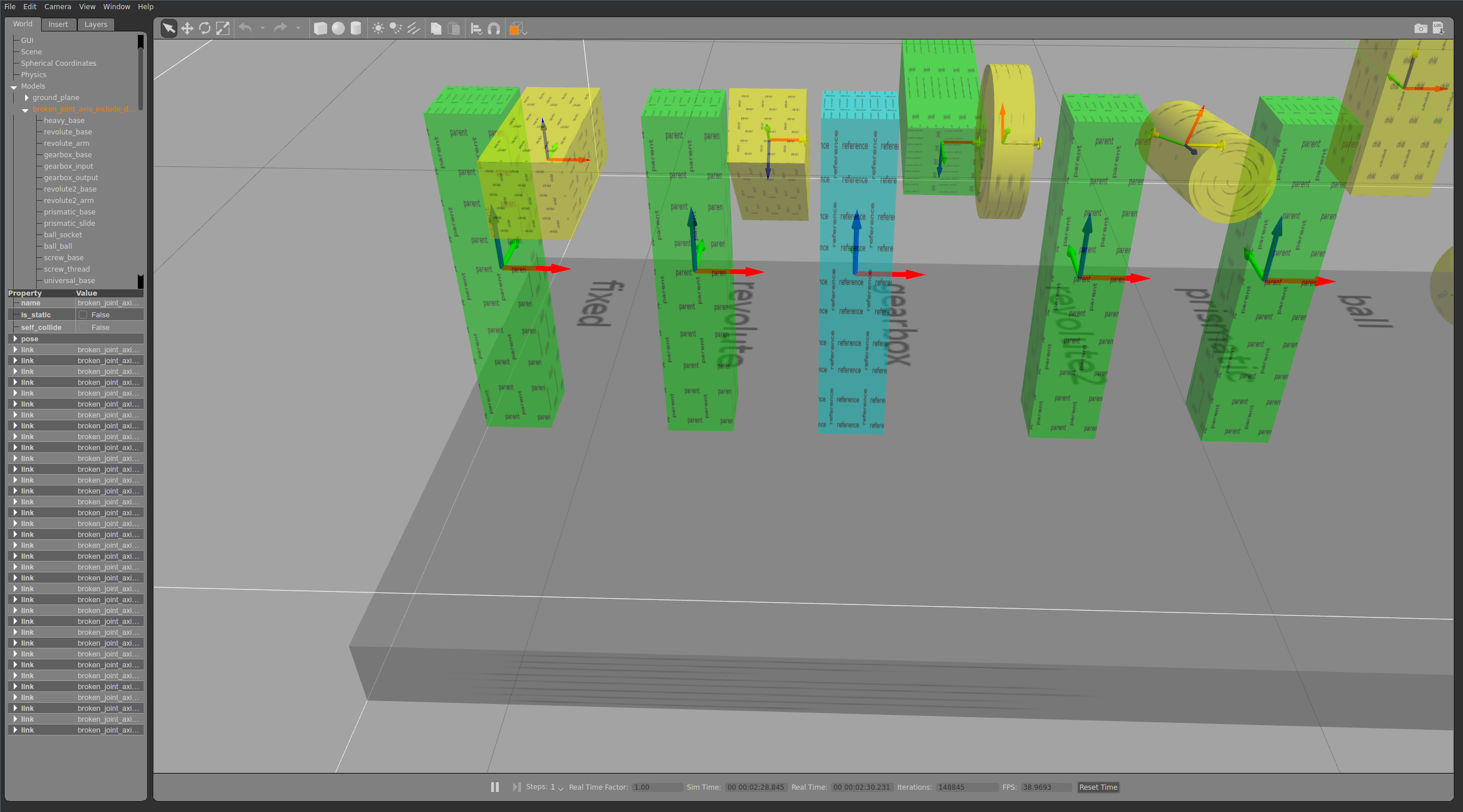
The issue is easily reproducible in Gazebo 7 and 8. A minimal example follows (and is attached) together with three screenshots that show the issue using the "Demo Joint Types" model from the online repository.
As there is simply a coordinate transform missing somewhere, I'd estimate someone more familiar with this part of the Gazebo code base, will be able to quickly fix it. I would highly appreciate it.
The combined model:
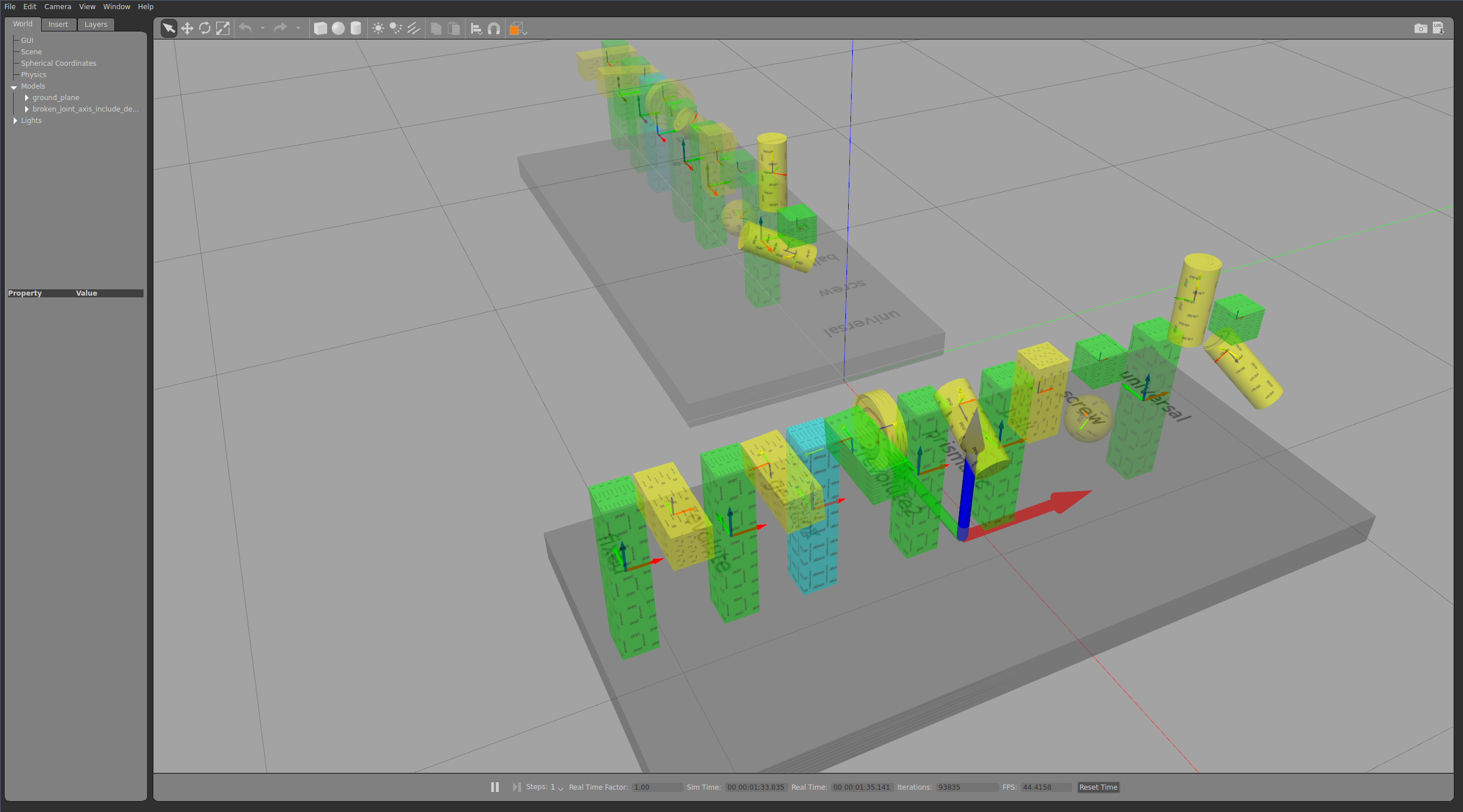
Correct :
Wrong in d model:
Note: Everything works if all joints in the d model use <use_parent_model_frame>1</use_parent_model_frame>, but then we are back at the non-intuitive way is defined (to model instead of child frame).
The text was updated successfully, but these errors were encountered: