Incorrect illumination in camera sensor images #2584
Comments
|
Original comment by Christian Rauch (Bitbucket: christian-rauch). The order in which both cameras are added seems to matter.
|
|
Original comment by Manuel Muehlig (Bitbucket: Manuel Muehlig). I have the same issue in our setting: A color camera (libgazebo_ros_camera.so) and depth camera (libgazebo_ros_openni_kinect.so). Upon startup, the point cloud generated by the depth camera and the color image generated by the color camera are missing shadows and are too dark. There seems to be some kind of race condition, since toggeling the “Enable shadows” button in the GUI (under Scene) multiple times fixes the issue for the running session. Everything works fine, if the depth camera is not included in the URDF. I guess it somehow messes with the global rendering parameters. |
Original report (archived issue) by Christian Rauch (Bitbucket: christian-rauch).
The original report had attachments: camera_lighting_problem.world
In a minimal example world with a camera and a depth sensor (see attached world file), the colour images have wrong illumination:
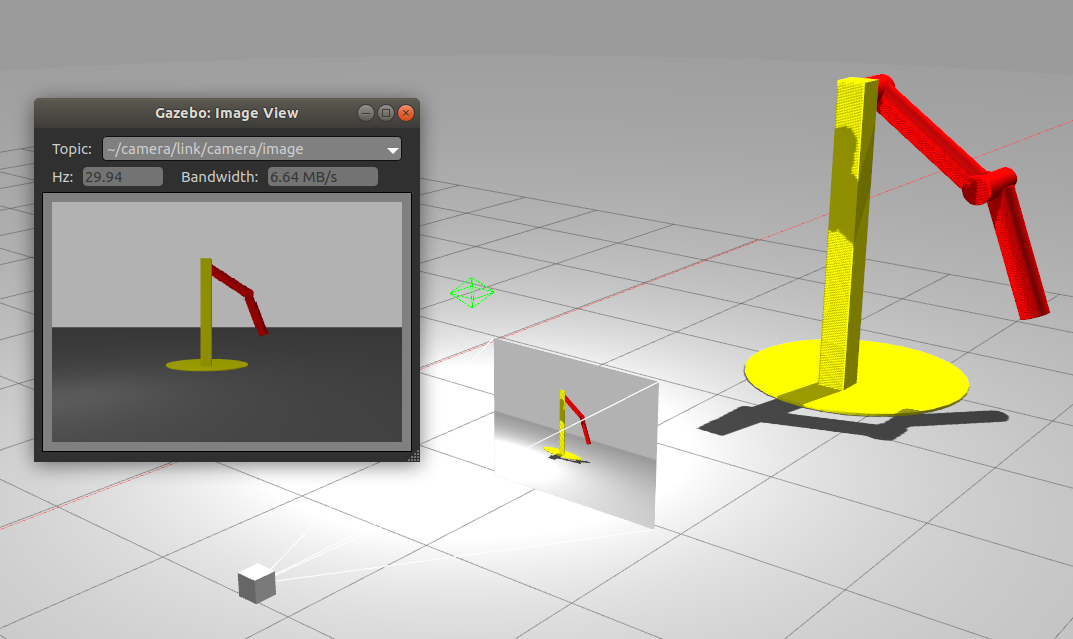
While the visualised image (the one in the camera frustum) has the correct colours, the published images are missing the correct illumination. E.g. they are missing shadows and the colours are less vivid.
If always_on is disabled for the depth sensor, it sometimes seem to work.
The text was updated successfully, but these errors were encountered: