This repository contains ROS packages that make up a fictitious mobile robot system, called Fictibot. The main purpose of these packages is to use them as a target application to learn how to use HAROS.
Fictibot represents a somewhat typical mobile robot base with a few incorporated sensors. The main inspiration behind this robot was TurtleBot2 (see the picture below), so you can imagine Fictibot as being similar to this platform, in terms of its fictitious hardware.

{kind=link}
In terms of sensors, Fictibot has:
- three bumper sensors on its front (left, center and right);
- one laser scanner (straight line in front of the robot);
- two wheel drop sensors (left wheel and right wheel);
- an emergency stop button.
Each of the bumper sensors can be in one of two states, either pressed or released.
The laser scanner reports distance values to the nearest obstacle in front of the robot. The values are reported in centimeters, in the range from 0 to 128 (exclusive). If there are no obstacles in front of the robot, it should always report 127, the maximum distance.
Each of the wheel drop sensors can be in one of two states, either dropped (no contact with the floor) or raised (in contact with the floor).
Pressing the emergency stop button should stop the robot immediately. This effect should last for a configurable safety period (5 seconds by default).
The main actuators of Fictibot are its two wheels, to provide movement. Movement is specified in terms of a target (desired) linear velocity (m/s) and angular velocity (rad/s).
A linear velocity value of 0 means a full stop, in terms of translation. Positive values mean forward movement, while negative values mean backward movement. The minimum value is -1 m/s. The maximum value is +1 m/s.
Linear acceleration is not instantaneous. The robot accelerates, at most, 0.5 m/s².
An angular velocity value of 0 means a full stop, in terms of rotation. Positive values mean rotation to the left, while negative values mean rotation to the right. The minimum value is -PI rad/s. The maximum value is +PI rad/s.
Angular acceleration is not instantaneous.
The robot accelerates, at most, PI/2 rad/s².
The full Fictibot system is composed of four different nodes, connected via topics as per the attached computation graph (PDF, PNG). The subsections below provide details into each of the different types of node found in the diagram.
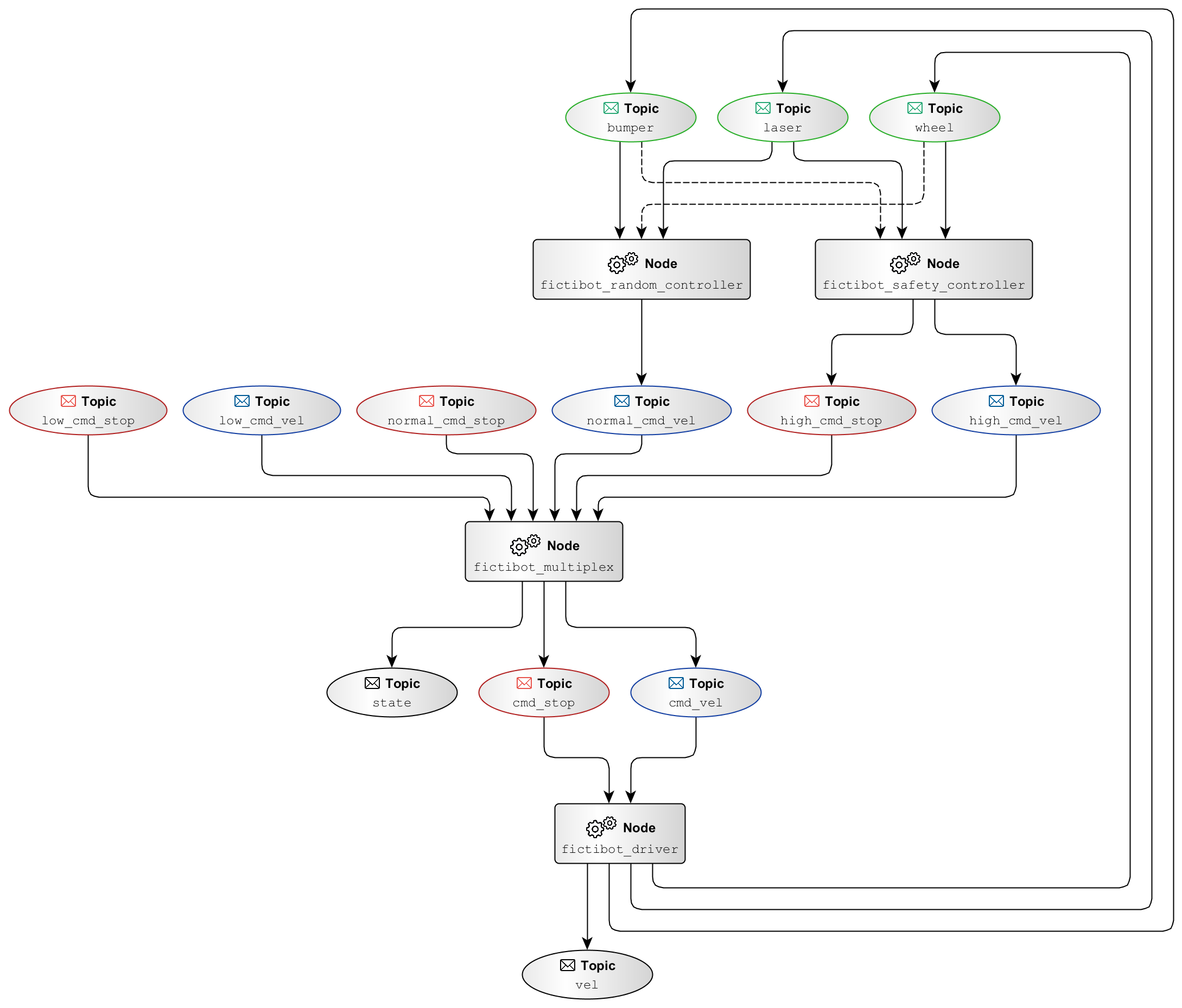{kind=link}
This node controls the sensors and actuators of Fictibot.
Given that Fictibot is not an actual robot, the node simulates hardware by providing seemingly random values for its sensor readings.
The full source code can be found in the fictibot_drivers package.
Subscribers
cmd_stop(std_msgs/Empty): receiving a message on this topic means that the emergency stop button has been pressed.cmd_vel(fictibot_msgs/VelocityCommand): receiving a message on this topic sets the current target velocity (with linear and angular velocity components); it does not change the current velocity of the robot, only its goal.
Publishers
vel(fictibot_msgs/VelocityCommand): publishes the current velocity of the robot (with linear and angular velocity components).bumper(fictibot_msgs/BumperEvent): publishes the latest readings of the state of the bumper sensors; the message contains boolean fields for theleft,centerandrightsensors, where a value oftruemeans pressed and a value offalsemeans released.laser(std_msgs/Int8): publishes the latest readings of the state of the laser scanner sensor; the message contains a singledatavalue holding the distance to the nearest obstacle in centimeters, from 0 to 127 (inclusive).wheel(fictibot_msgs/WheelDropEvent): publishes the latest readings of the state of the wheel drop sensors; the message contains boolean fields for theleftandrightsensors, where a value oftruemeans dropped and a value offalsemeans raised.
Parameters
stop_time(double): the time, in seconds, during which the robot should remain stopped, after pressing the emergency stop button; defaults to 5 seconds.
This node issues new velocity commands to the robot, chosen at random and changing periodically.
If the robot runs into an obstacle, a new command is chosen in response.
The full source code can be found in the fictibot_random_controller package.
Subscribers
bumper(fictibot_msgs/BumperEvent): stores the bumper state to process at the nextspiniteration; values oftruein any field trigger a command change.laser(std_msgs/Int8): stores the laser state to process at the nextspiniteration; values of 50 or lower trigger a command change.wheel(fictibot_msgs/WheelDropEvent): stores the wheel drop state to process at the nextspiniteration; values oftruein any field trigger a command change.
Publishers
cmd_vel(fictibot_msgs/VelocityCommand): publishes a new target velocity (with linear and angular velocity components).
Parameters
change_time(double): controls the frequency (in seconds) at which a new velocity command is chosen; defaults to 5 seconds.
This reactive node issues velocity and emergency stop commands in response to the sensors of Fictibot.
The messages are published only once every t seconds, with t being a configurable value.
The full source code can be found in the fictibot_safety_controller package.
Subscribers
bumper(fictibot_msgs/BumperEvent): publishes an emergency stop request in response to values oftruein any field.laser(std_msgs/Int8): publishes a velocity command of zero (in both components) for laser values of 64 or lower, or publishes an emergency stop request for values of 32 or lower.wheel(fictibot_msgs/WheelDropEvent): publishes an emergency stop request in response to values oftruein any field.
Publishers
cmd_vel(fictibot_msgs/VelocityCommand): publishes a new target velocity (with linear and angular velocity components) in response to certain readings of the laser scanner sensor.cmd_stop(std_msgs/Empty): publishes an emergency stop request in response to certain readings of bumper, laser or wheel drop sensors.
Parameters
reaction_time(double): the time (in seconds) during which the node avoids sending further (repeating) messages; defaults to 1 second.
This node is a multiplexer for the different sources of velocity and emergency stop commands of Fictibot.
It provides three channels with different priority levels, namely a low priority channel, a normal priority channel and a high priority channel.
Messages of higher priority are forwarded and set a temporary lock period, during which messages of lower priorities are dropped.
Initially, messages of all priorities are allowed.
After a period of inactivity (defaults to 1 second), the priority locks are reset to the initial state.
The full source code can be found in the fictibot_multiplex package.
Subscribers
low_cmd_vel(fictibot_msgs/VelocityCommand): input channel for low priority velocity messages.low_cmd_stop(std_msgs/Empty): input channel for low priority emergency stop messages.normal_cmd_vel(fictibot_msgs/VelocityCommand): input channel for normal priority velocity messages.normal_cmd_stop(std_msgs/Empty): input channel for normal priority emergency stop messages.high_cmd_vel(fictibot_msgs/VelocityCommand): input channel for high priority velocity messages.high_cmd_stop(std_msgs/Empty): input channel for high priority emergency stop messages.
Publishers
cmd_vel(fictibot_msgs/VelocityCommand): forwards all received velocity command messages that pass through the priority filter.cmd_stop(std_msgs/Empty): forwards all received emergency stop messages that pass through the priority filter.state(std_msgs/Int8): publishes changes to the priority filter state of the multiplexer; negative values mean that all priorities are enabled (low, normal and high); a value of 0 means that only normal priority and high priority messages are allowed; positive values mean that only high priority messages are allowed.
A number of variants of the Fictibot system can be found in the fictibot_launch package.
minimal.launch: deploys the Fictibot driver and a Random Controller.dual_bots.launch: similar tominimal.launch, but deploys two Fictibot robots, one under the/onenamespace and the second under the/twonamespace.multiplexer.launch: deploys the Fictibot driver, a random controller, a safety controller and a multiplexer to manage the commands of both controllers. The safety controller is assigned a high priority, while the random controller is assigned a normal priority.safe_random_walker.launch: a slightly more complex version ofmultiplexer.launchthat also configures available parameters with custom values.type_check.launch: deploys a Fictibot driver and a safety controller, but intentionally introduces a topic remapping that causes a message type error, for demonstration purposes.
In addition to the launch files found in the fictibot_launch package, each package containing Fictibot nodes also provides standalone.launch files that launch the individual nodes of the respective package.