In this work, we develop a dynamic and scalable virtual environment for the Scara robot where the physical robot can be easily defined and extended by adding more links. We use the DDPG(Deep Deterministic Policy Gradient) algorithm to let the robot learn the task of inverse kinematics, which is, actuating different joints to reach a target object where the location of the target object is known.
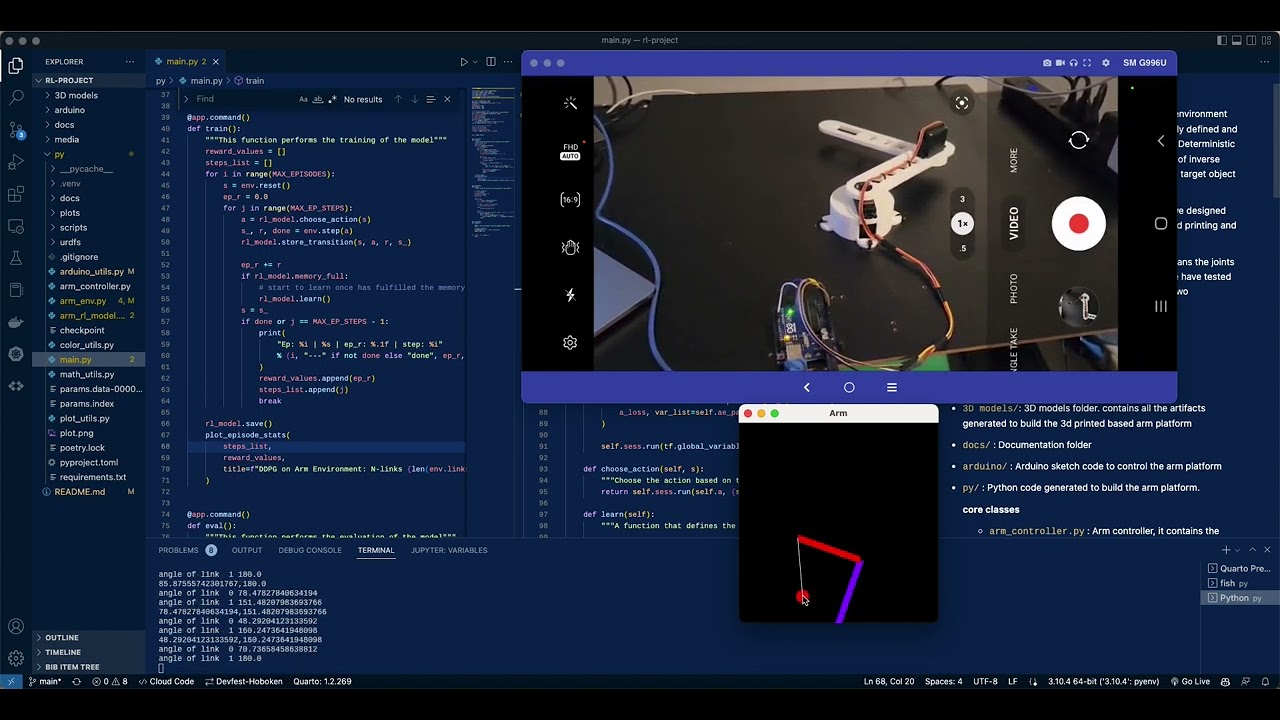
In addition, in order to test our model in the real world, we designed and developed a scaled version of a Scara robot using 3d printing and Arduino.
Our Scara robot consists of cascadable joints, which means the joints can be repeated to increase the degrees of freedom. We have tested the system with a Scara robot consisting of 2 links and two independent joints.
We designed a scara robot using Solidworks. The links are designed in such a way so that they can be cascaded on demand. Hence, the links are modular and can be chained, thus, increasing and decreasing the degrees of freedom is easy to attain with such a structure. The length of each link is 150mm. However, our parametric design approach enables to change the length before 3D printing. Each of the links can have one or two joints. If a link is parent of another link, then it has two joints, else one. The joints are revolute joints with a [0,pi] range of angle.

For this project, we have also developed a digital twin environment of the Scara robot platform. It allow us to visualize and evaluate how the model performs in a virtual environment. Users can arbitrarily customize and dynamically add links to the robot arm and customize the angle boundaries for each connection. The simulation environment was developed using pyglet.
Note: To add a target object or move it around the environment, click with the mouse at any location

All the documentation can be found here: docs
-
3D models/: 3D models folder. contains all the artifacts generated to build the 3d printed based arm platform -
docs/: Documentation folder -
arduino/: Arduino sketch code to control the arm platform -
py/: Python code generated to build the arm platform.core classes
arm_controller.py: Arm controller, it contains the class to control the arm platform.arm_env.py: RL environment, it contains the class to build the RL environmentarm_rl_model.py: Arm model, it contains the class to build the RL model. For this project we used and implementation of the DDPG algorithmmain.py: Application entry point, this script should be used to train, evaluate the model, and for rendering the simulation environment.
utils
arduino_utils.py: Arduino utils, it contains some functions and classes to control the Arduino board.math_utils.py: Math utils, it contains some functions and classes to perform some math operations.plot_utils.py: Plot utils, it contains some functions and classes to plot the training results.
For running the app, we recommend creating a virtual environment. The dependencies could be installed using pip or poetry.
- Using pip
run the command.
cd py
pip install -r requirements.txt- Using poetry
For poetry users, use the command poetry install.
Either way, both commands need to be executed from the py folder.
cd py
poetry install
To train the model, use the command python main.py train. This command will train the model and save the parameters in the py folder.
To evaluate the model, use the command python main.py evaluate. This command will load the model parameters from the py folder and evaluate the model.
To render the simulation environment, use the command python main.py render. This command will load the model parameters from the py folder and render the simulation environment in inference mode.
All the simulation and training parameters can be modified in the main.py file.
# Simulation parameters
ENV_SIZE = Size2D(300, 300)
ARM_ORIGIN = Point2D(ENV_SIZE.width / 2, 0)
N_LINKS = 2
LINK_LENGTH = 100
MAX_EPISODES = 900
MAX_EP_STEPS = 300
