Tools
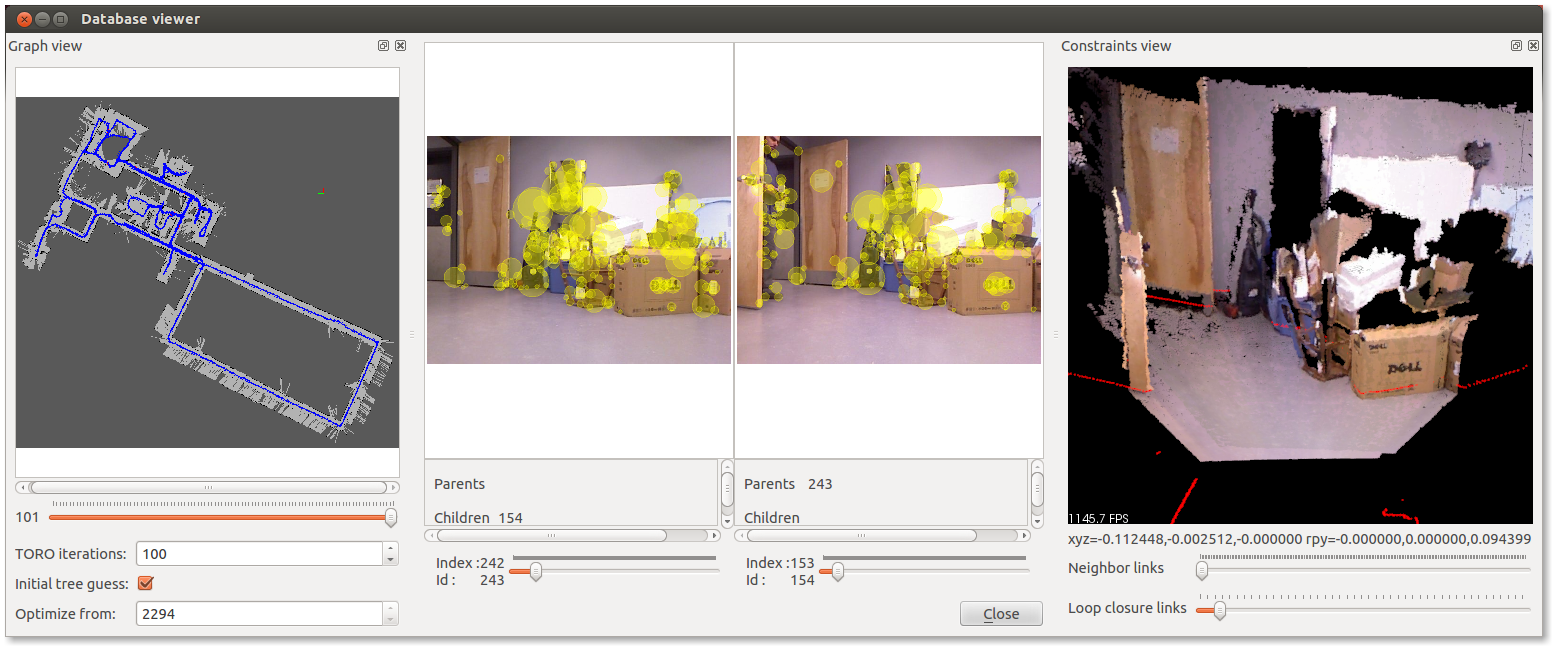
This tool is useful to browse stuff saved in a RTAB-Map database. There is a standalone app (rtabmap-databaseViewer.exe) or it can be opened from "Tools->Edit database..." in RTAB-Map. You can also generate 3D map, TORO graph, DOT graph and extract images from the database. For example with this database: 5MappingSessions_OnlineConstraint700ms.db.zip
$ rtabmap-databaseViewer 5MappingSessions_OnlineConstraint700ms.db
You can browse images in the database and add/remove loop closures. Explore also the right clicks over the views, more options available as well as in the menus.
This tool is a simple application from the terminal to try different odometry approaches implemented in RTAB-Map. This mostly the same as in RTAB-Map->Edit->Preferences->Odometry->"Test odometry" but from the terminal. Look at the examples shown in the usage below.
EDIT: this tool has not been continously updated over time and may not have all options available with the RTAB-Map->Edit->Preferences->Odometry->"Test odometry". If you want to record a database like the example below, use the action RTAB-Map->Tools->"Data recorder..." in the standalone app.
$ rtabmap-odometryViewer
Usage:
odometryViewer [options]
Options:
-bow # Use bag-of-words odometry (default 0): 0=SURF, 1=SIFT
-bin Use binary odometry (FAST+BRIEF)
-icp Use ICP odometry
-hz #.# Camera rate (default 0, 0 means as fast as the camera can)
-db "input.db" Use database instead of camera (recorded with rtabmap-dataRecorder)
-clouds # Maximum clouds shown (default 10, zero means inf)
-sec #.# Delay (seconds) before reading the database (if set)
-in #.# Inliers maximum distance, features/ICP (default 0.005 m)
-max # Max features used for matching (default 0=inf)
-min # Minimum inliers to accept the transform (default 20)
-depth #.# Maximum features depth (default 5.0 m)
-i # RANSAC/ICP iterations (default 100)
-lu # Linear update (default 0.0 m)
-au # Angular update (default 0.0 radian)
-reset # Reset countdown (default 0 = disabled)
-bin_brief_bytes # BRIEF bytes (default 32)
-bin_fast_thr # FAST threshold (default 30)
-bin_lsh Use nearest neighbor LSH (default brute force hamming)
-d # ICP decimation (default 4)
-v # ICP voxel size (default 0.005)
-s # ICP samples (default 0, not used if voxel is set.)
-f #.# ICP fitness (default 0.01)
-debug Log debug messages
Examples:
odometryViewer -bow 0 SURF example
odometryViewer -bow 1 SIFT example
odometryViewer -bin -hz 10 FAST/BRIEF example
odometryViewer -icp -in 0.05 -i 30 ICP example
Using a database called input.db (not available for download anymore), the four techniques are compared:
- In order: SURF, SIFT, BRIEF/FAST and ICP
./rtabmap-odometryViewer -hz 10 -db input.db -bow 0 -clouds 0
./rtabmap-odometryViewer -hz 10 -db input.db -bow 1 -clouds 0
./rtabmap-odometryViewer -hz 10 -db input.db -bin -clouds 0 -in 0.005 -bin_brief_bytes 64
./rtabmap-odometryViewer -hz 10 -db input.db -icp -in 0.04 -v 0.02 -clouds 0 -f 1 -i 30

This tool can be used to record images from a webcam or an OpenNI camera (with depth) to RTAB-Map database format, which can be after used as input for RTAB-Map.
$ rtabmap-dataRecorder
Usage:
dataRecorder [options] output.db
Options:
-hide Don't display the current cloud recorded.
-debug Set debug level for the logger.
-rate #.# Input rate Hz (default 0=inf)
-openni Use openni camera instead of the usb camera.