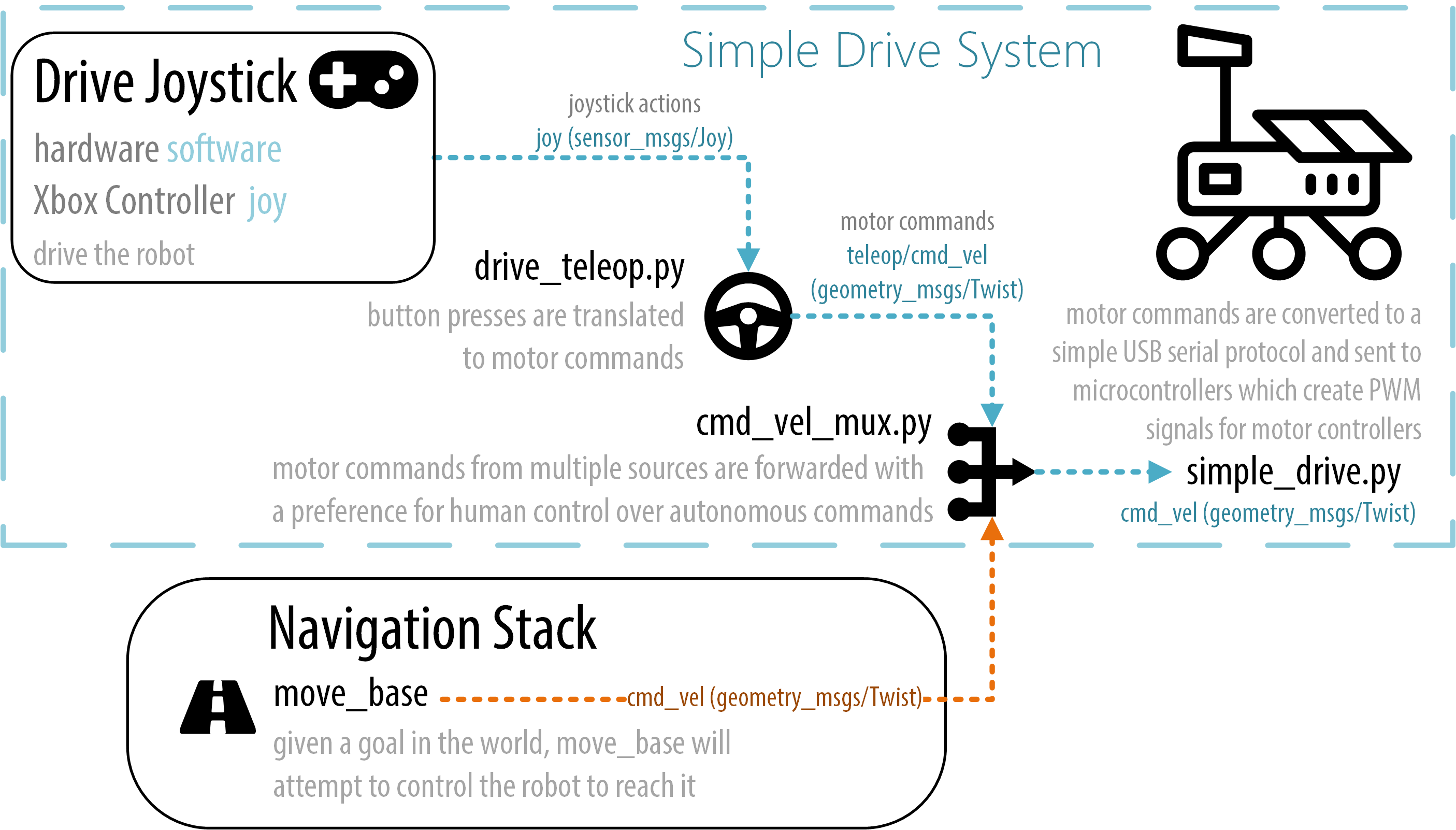
A simple robot drive system for car-like vehicles. Button control of relay service.
TODO: Diagram for lawn tractor
Move button setup to launch file
Instructions on setup
Demo of package with simulator
- Install:
catkin_ws/src$ git clone https://github.com/ros-agriculture/tractor_teleop.git
catkin_ws$ catkin build
- Launch ROS nodes:
$ roslaunch tractor_teleop drive_teleop.launch joy_dev:=/dev/input/js0
$ roslaunch tractor_teleop cmd_vel_mux.launch
OR all-in-one launch:
$ roslaunch tractor_teleop drive.launch
-
Instructions
-
Drive your robot around.
The package uses Daniel Snider's simple_drive http://wiki.ros.org/simple_drive