* Denotes equal contribution
Multi-rotor aerial autonomous vehicles (MAVs) primarily rely on vision for navigation purposes. However, visual localization and odometry techniques suffer from poor performance in low or direct sunlight, a limited field of view, and vulnerability to occlusions. Acoustic sensing can serve as a complementary or even alternative modality for vision in many situations, and it also has the added benefits of lower system cost and energy footprint, which is especially important for micro aircraft. This paper proposes actively controlling and shaping the aircraft propulsion noise generated by the rotors to benefit localization tasks, rather than considering it a harmful nuisance. We present a neural network architecture for self noise-based localization in a known environment. We show that training it simultaneously with learning time-varying rotor phase modulation achieves accurate and robust localization. The proposed methods are evaluated using a computationally affordable simulation of MAV rotor noise in 2D acoustic environments that is fitted to real recordings of rotor pressure fields.



Harness and shape the propulsion noise of multi-rotor aircraft to improve localization accuracy. We propose a system for self-noise-based localization in a known environment. We show that training it simultaneously with learning time-varying rotor phase modulation achieves accurate and robust localization. The proposed methods are evaluated using a computationally affordable simulation of MAV rotor noise in 2D acoustic environments that is fitted to real recordings of rotor pressure fields.
Paper: Link
To set up our environment, please run:
pip install -r requirements.txt
or
conda install --file requirements.txt
Repository layout:
.
├── LICENSE
├── README.md
├── _config.yml
├── controller
│ └── controller.py
├── data_processing
│ ├── create_signals_manually.py
│ └── pre_processing.py
├── forward_model
│ ├── RealRecordings.py
│ ├── forward_indoor_wrapper.py
│ ├── forward_model.py
│ ├── forward_model_wrapper.py
│ ├── jax_scipy_minimize_forward.py
│ ├── load_tfevent.py
│ ├── non_convex_room.py
│ ├── optimized_data
│ └── real_recordings
├── images
│ ├── IMG-20240215-WA0025.jpg
│ ├── IMG-20240220-WA0004.jpg
│ ├── VID-20240218-WA0003.mp4
│ ├── forward_model.png
│ ├── fwd-model-1.png
│ ├── technion_logo.png
│ └── vista_logo.png
├── io
│ ├── fast_io.py
│ └── hdf5.py
├── localization
│ ├── evaluate.py
│ ├── multi_position
│ │ ├── aggregator.py
│ │ ├── constant_speed.py
│ │ ├── dataset.py
│ │ ├── master.py
│ │ └── trajectory_factory.py
│ ├── penalty.py
│ ├── phase_modulation
│ │ ├── input_sound_parameters.npz
│ │ ├── modulation_dataset.py
│ │ ├── phase_modulation_injector.py
│ │ └── phase_modulation_pipeline.py
│ ├── physics.py
│ ├── preprocess.py
│ ├── train_pipeline.py
│ ├── train_separate.py
│ └── transformer_encoder.py
├── pyroomacoustics_differential
│ ├── acoustic_methods.py
│ ├── acoustic_methods_onp.py
│ ├── consts.py
│ ├── forward_model_2D_interface.py
│ ├── geometry.py
│ ├── geometry_onp.py
│ ├── plot_room.py
│ └── room.py
├── requirements.txt
├── scripts
│ ├── acoustic_reflection_coefficient_dataset_generation.sh
│ ├── aspect_ratio_dataset_generation.sh
│ ├── shear_dataset_generation.sh
│ └── uniform_scale_dataset_generation.sh
└── simulator
├── elaborate.py
├── elaborate_modulate_phase.py
└── scripts.sh
Download the real recordings from here and place them in the folder forward_model/real_recordings/.

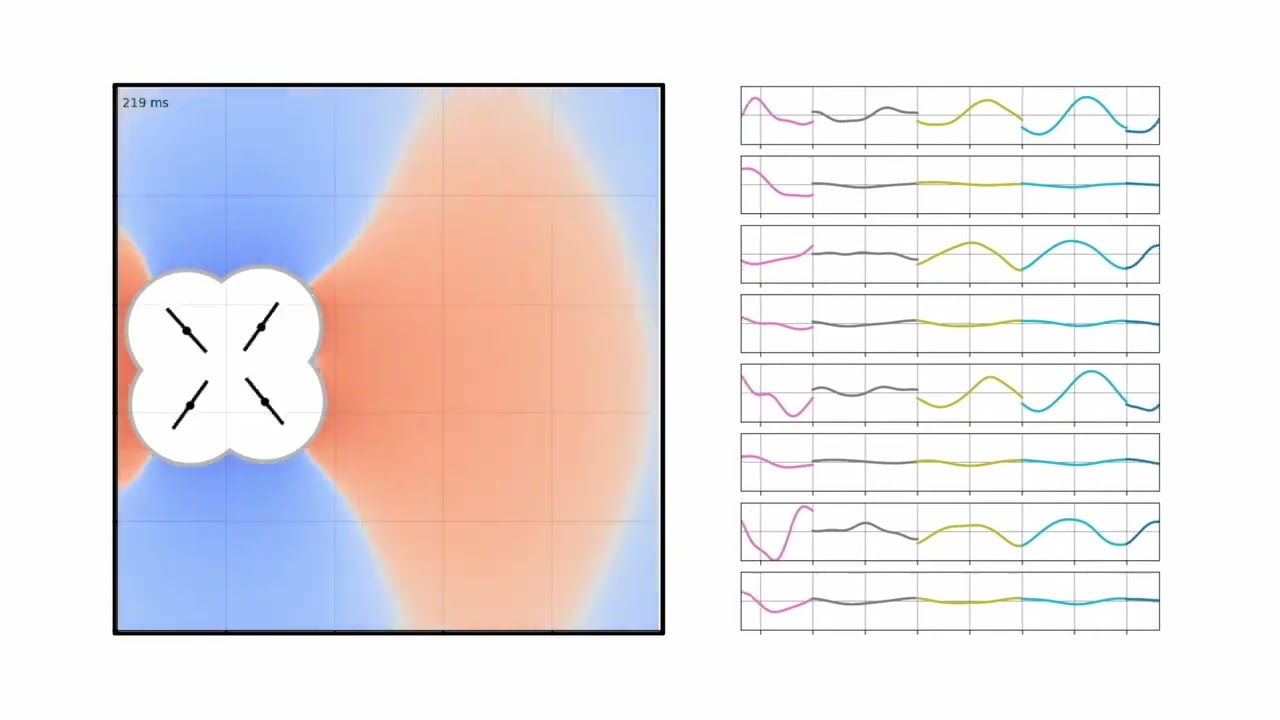
Forward Process Layout
In order to fit the parameters of the forward model run:
python forward_model/forward_model.py -gpu <GPU> -exp_name <NAME OF THE EXPERIMENT> -optimize
Where:
<GPU>represents which GPU to use<NAME OF THE EXPERIMENT>represents the name to assign to the experiment
Once the parameters of the forward model have been fitted, you can synthesize a dataset for the inverse model where the pressure is captured by the microphones mounted on a circular array on the aircraft by running the following command:
python forward_model/forward_indoor_wrapper.py -gpu <GPU> -exp_name <NAME OF THE EXPERIMENT> -max_order <MAX ORDER> -num_rotors 4 -num_phases_mics <NUMBER OF MICROPHONES> -saved_data_dir_path <DATA PATH> -e_absorption <WALLS ABSORPTION COEFFICIENT> -num_points_per_side <NUMBER OF POINTS PER SIDE> -room_x <WALL 1 LENGTH> -room_y <WALL 2 LENGTH> -number_of_angles <NUMBER OF ANGLES PER POINT>
Where:
-
<GPU>represents which GPU to use -
<NAME OF THE EXPERIMENT>is the name assigned to the experiment during the parameter fitting phase -
<MAX ORDER>is the maximum image order to use -
<NUMBER OF MICROPHONES>is the number of microphones to use (e.g. 8) -
<DATA PATH>is the path to save the data -
<WALLS ABSORPTION COEFFICIENT>is the absorption coefficient of the walls in the room (e.g. 0.5). The absorption coefficient is a value between 0 and 1, where 0 means no absorption and 1 means full absorption. It is defined as$1 - \gamma$ , where$\gamma$ is the reflection coefficient. -
<NUMBER OF POINTS PER SIDE>is the number of points per side in the room (e.g. 63) -
<WALL 1 LENGTH>is the length of the first wall in meters (assuming a rectangular room) -
<WALL 2 LENGTH>is the length of the second wall in meters (assuming a rectangular room) -
<NUMBER OF ANGLES PER POINT>is the number of angles to use per point in the room (e.g. 64)
In order to reproduce the datasets used for the robustness tests, first fit the parameters of the forward model (see parameter fitting) and then run the commands listed in the next sections.
To generate the dataset for the robustness test of the uniform scale:
- Generate the set of RIRs (Room Impulse Responses) for the different scales:
scripts/uniform_scale_dataset_generation.sh cpu
- Given the set of RIRs, generate the set of sounds :
scripts/uniform_scale_dataset_generation.sh gpu <NUMBER OF GPUS>
Where:
<NUMBER OF GPUS>is the number of GPUs to use
To generate the dataset for the robustness test of the aspect ratio:
- Generate the set of RIRs (Room Impulse Responses) for the different aspect ratios:
scripts/aspect_ratio_dataset_generation.sh cpu
- Given the set of RIRs, generate the set of sounds :
scripts/aspect_ratio_dataset_generation.sh gpu <NUMBER OF GPUS>
Where:
<NUMBER OF GPUS>is the number of GPUs to use
To generate the dataset for the robustness test of the shear:
- Generate the set of RIRs (Room Impulse Responses) for the different shears:
scripts/shear_dataset_generation.sh cpu
- Given the set of RIRs, generate the set of sounds :
scripts/shear_dataset_generation.sh gpu <NUMBER OF GPUS>
Where:
<NUMBER OF GPUS>is the number of GPUs to use
To generate the dataset for the robustness test of the acoustic reflection coefficient:
- Generate the set of RIRs (Room Impulse Responses) for the different reflection coefficients:
scripts/acoustic_reflection_coefficient_dataset_generation.sh cpu
- Given the set of RIRs, generate the set of sounds :
scripts/acoustic_reflection_coefficient_dataset_generation.sh gpu <NUMBER OF GPUS>
Where:
<NUMBER OF GPUS>is the number of GPUs to use
To train the inverse model in the default settings run:
python localization/train_separate.py --data-path <PATH TO DATA>
Where:
<PATH TO DATA>is the path to the data generated by the forward model
To train the inverse model with noisy sound run:
python localization/train_separate.py --data-path <PATH TO DATA> --inject-noise-in-sound --desired-snr-in-db-list <SNR LEVELS>
Where:
<PATH TO DATA>is the path to the data generated by the forward model<SNR LEVELS>is a list of SNR levels in dB to use for the noisy sound
To train the inverse model with noisy phase modulation run:
python localization/train_separate.py --data-path <PATH TO DATA> --system-noise-snr-db <SNR LEVEL>
Where:
<PATH TO DATA>is the path to the data generated by the forward model<SNR LEVEL>is the SNR level in dB to use for the noisy phase modulation
This research was supported by ERC StG EARS. We are grateful to Yair Atzmon, Matan Jacoby, Aram Movsisian, and Alon Gil-Ad for their help with the data acquisition.
If you use this code for your research, please cite the following work:
@misc{@article{gabriele2024active,
title={Active propulsion noise shaping for multi-rotor aircraft localization},
author={Gabriele Serussi and Tamir Shor and Tom Hirshberg and Chaim Baskin and Alex Bronstein},
journal={arXiv preprint arXiv:2402.17289},
year={2024}
}
}