-
Notifications
You must be signed in to change notification settings - Fork 227
I have a question, where should I ask it?
I suggest you to use the Google Groups Community. In this way, other users with the same question can find the answer easily.
Where can I find more documentation about this project?
There are 3 main sites where you'll find info about this project:
Where can I find the latest version of Thor?
You can find the updated version at Thor's GitHub repository.
How much does it cost to build this robot arm?
The total cost of components is around 350€. It is understood that you have access to a 3D printer where you can print all of the pieces.
How much time is required to build this robot arm?
The total printing time is around 200 hours. Once printed, the assembly takes 6 hours more or less.
What are the components used in this project?
Here is a list of materials where you will find every component used in this project.
Where can I buy the components?
As most components I have used are also used to build 3D printers, you would find many of them in those kind of stores. In this wiki page you'll find a recopilation of links made by the community.
Where can I buy a kit?
If you don't have a 3D printer and you want to build a Thor anyway, there are alternatives.
The owner of bitfab.io gave me a nice budget, do not hesitate to contact him if you want a kit!
Currently I don't know anyone who sells a Thor electronics kit.
What 3D printer do I need to print it?
A printing area of 200x200mm is enough to print all parts. If you want to print the Art2Body pieces in one single piece, instead of printing the split ones, you will need a 200x300mm printer area.
Is there anything to consider before starting to print it?
Yes. In order to avoid possible printing issues, it is highly recommended that you calibrate your printer before you start printing the pieces. Make sure that the printed dimensions (both interior and exterior ones) match the dimensions of the design.
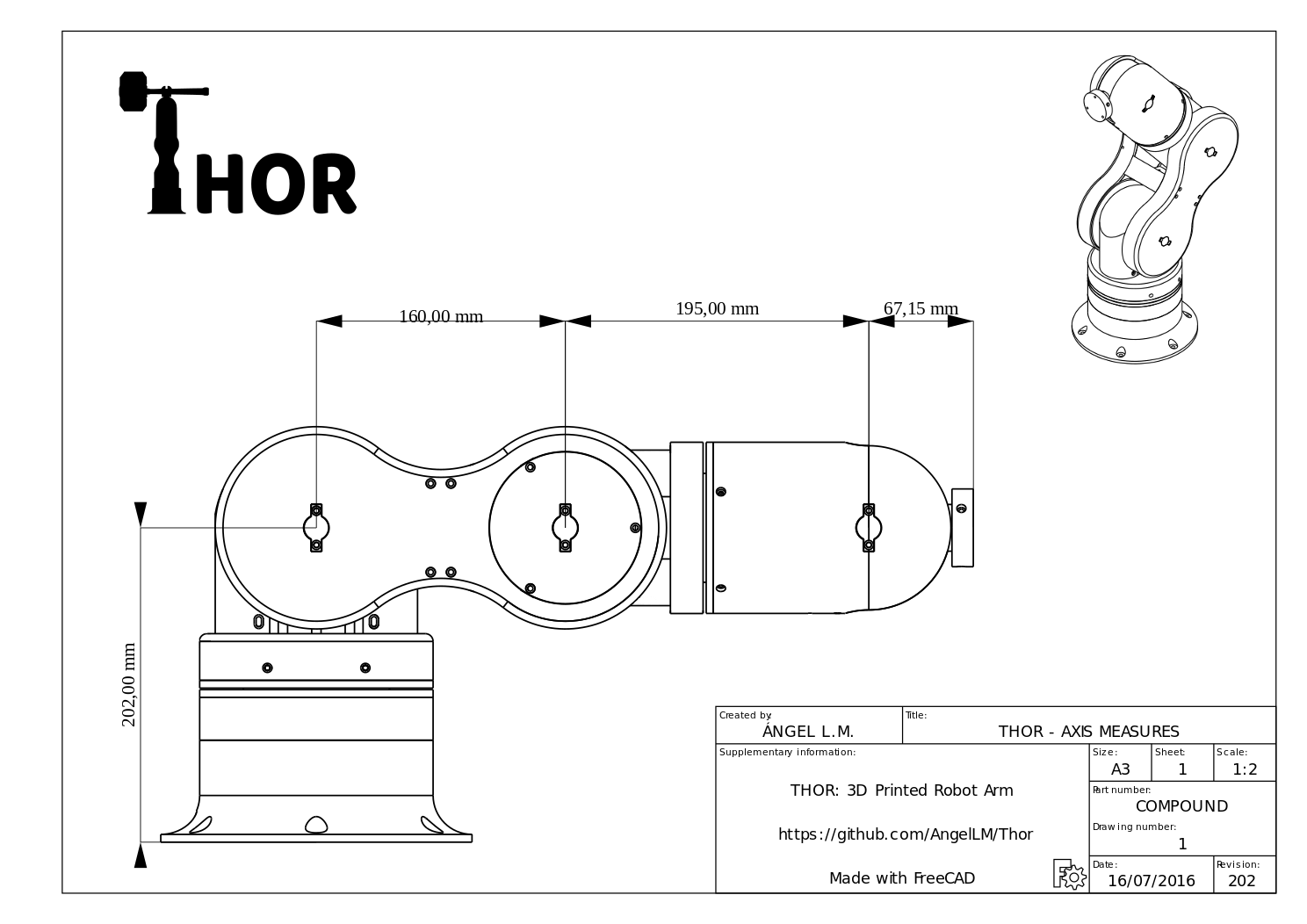
What are the robot's dimensions?
Fully stretched vertically, Thor is 624,15mm tall without the tool. In this picture you can see its dimensions.
{kind=link}
How much weight can Thor lift?
Currently, the maximum load I succeeded to lift is 750 grams (including the tool weight). Thor can still lift that load when it's stretched horizontally, which is the worst case scenario.
What is the fastest speed Thor can reach?
At this time I have not tested this yet. Coming soon.
What is its positioning accuracy?
It depends on each articulation. The first two articulations have an accuracy of less than a degree. The third one is accurate to about a degree. The fourth has an error of about 2 degrees. And the last two articulations have the worst accuracy, with an error of 3-4 degrees.
Note 1: All of this data was collected manually and refers to my own prototype. The accuracy is directly linked to the printing accuracy and the assembly.
Note 2: As the current design has no feedback sensors to ensure positional accuracy I have assumed that the robot is moving well and is not missing steps.
What are the electronics used in this project?
The board that runs the firmware is an Arduino Mega. The board where all actuators and sensors are connected to is a custom PCB I designed.
Note: Some users are using commercial boards to control Thor instead of using the Arduino Mega and making the Control PCB board.
What is the firmware used to control the movements?
I'm using a modified version of GRBL to control Thor.
How is the communication between the user and the robot arm?
Currently, the communication is not too intuitive. To control the robot I send the values of each articulation rotation via serial to the Arduino. As I am using GRBL to control it, the code sent is a custom G-Code.
Note: There are users developing a Graphical User Interface (GUI) that is much more intuitive than my method.
How can I contribute to this project?
You can give feedback to the community, show your progress, share the project, answer other users' questions, etc.
If you are interested in the development of the project you can also make your own modifications and share them with the community.
Let's make this greater!
Under what license is this project shared?
All files of the project are licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
What I'm allowed to do with the CC-BY-SA license?
As the CC-BY-SA License goes, you are free to share and adapt the material for any purpose, even commercially.
In any case you must give appropriate credit, provide a link to the license, and indicate if changes were made. If you remix, transform, or build upon the material you must distribute your contributions under the same license as the original.
No warranties are given. The license may not give you all of the permissions necessary for your intended use.
Why are you sharing Thor for free?
One of the main purposes of this project is to bring people closer to robotics. I thought that it would have more success sharing it for free.
Also, as I'm really concerned about Open Source, I did it using Open Source tools. It made sense to me to share it using an Open Source license too.
Finally, as this project is Open, anyone can upgrade it and share it with the community. Making this project greater than what could have been if developed only by me.
What tools have you used in the development of Thor?
These are the software tools I have used:
- FreeCAD: 3D Design
- Blender: 3D Design
- KiCaD: Electronic Design
- Atom: Building Text Editor
- Cura: Slicing Software
- bCNC: CNC controller
These are the hardware tools I have used:
- Prusa i3 custom: 3D Printer
- Witbox: 3D Printer
- Cyclone PCB Factory: CNC