How can I get quaternions from RealSense 515 #2241
Comments
|
I have also assigned 'Unite IMu method' to Linear Interpolation,for further test.What really bothers me is that linee_acceleration's parameters get worse and worse as time goes by. |

|
Hi @xyxegle In #1449 (comment) Doronhi the RealSense ROS wrapper developer suggests displaying the rotation quaternions (regarding the transform between gyro and depth) using the command below: rosrun tf tf_echo camera_depth_optical_frame camera_gyro_optical_frame In regard to the linear interpolation mode, Copy should provide greater stability of values. |
|
|

|
If you are referring to the messages about the IMU not being calibrated and the frame time domain being HARDWARE_CLOCK, this should not affect the retrieval of quaternions as far as I am aware. |
|
However, I did not receive any information about quaternion as you said. |
|
Did you try an echo command of the gyro with a rosrun instruction after launch has completed, as suggested above in #2241 (comment) please? |
|
Yes, I tried the method you said, but it doesn't seem to work, the upper left corner of the previous answer is the result of running the command |
|
Given that you are using unite_imu_method to publish the IMU as a single 'imu' topic instead of separate gyro and accel topics, does the echo work if you do it like this: rosrun tf tf_echo camera_depth_optical_frame camera_imu_optical_frame |
|
|

|
There is a discussion at #2097 about 0.000 time when performing a tf echo. I do not personally know of a method for activating a rosrun tf echo from within a launch file, since rosrun is a process that is performed after launch is completed. |
|
After several experiments, I think the solution you give should not be the camera quaternion information. I think it's more like relative position information inside the sensor. I changed the position, direction and Angle of the sensor, but I got the same data after every restart, which I think is abnormal. Do you have any other solutions? |
|
The extrinsic transforms describe the fixed position and rotation relationship between two sensors. What would update in real-time when a camera that is equipped with an IMU is rotated is the gyro xyz angles (roll, pitch, yaw). and the movement speed of the camera (its accel) |
|
So how do I get the Euler Angle of the IMU output? The 'unite IMU method' provides both linear and angular velocities. But how do I get euler angles(roll\pitch\yaw)? |
|
As you can see, this is gyro and Accel output separately. There is no euler Angle content. How can I get it? |


|
|

|
In #1932 (comment) a RealSense ROS user also obtained the IMU quaternions using a ROS package called imu_tools |
|
Hi @xyxegle Do you require further assistance with this case, please? Thanks! |
|
Thank you very much. I have solved the problem.I have created a new problem, could you help me to solve it?Here's a link to that question:#2250 |
|
It's excellent to hear that you found a solution for your quaterions issue, and I have replied at your other question. I will now close this quaternion issue. Thanks again! |
I'm going to do an experiment that uses quaternions. I have enabled enable_gyro and enable_accel in the launch file and assigned unite_IMu_method to "copy". Now I have successfully obtained the /camera/ IMU topic, but when I subscribed to the topic, I found that the orientation part of the topic was null, may I ask if I have the wrong configuration there?
This is the topic content THAT I got, and you can see that the orientation section is always empty
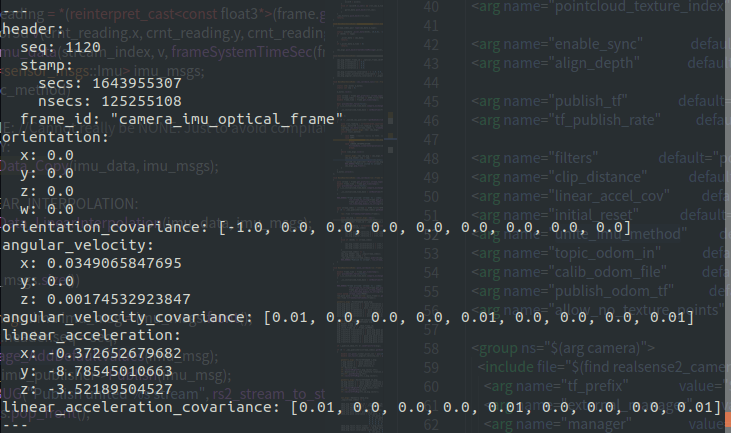
This is the modified content in my launch file. Line 52 is assigned "copy" in addition lines 35 and 36 is assigned to "true".
The text was updated successfully, but these errors were encountered: