Motion Control Stack
The motion stack is made up of the high level planners and the controllers in the below diagram.
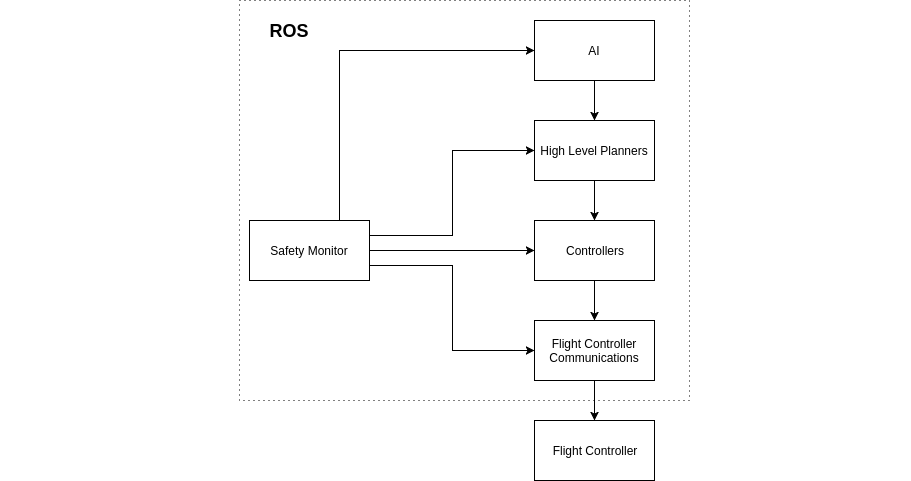
All of this is in the iarc7_motion repository, and is implemented in two nodes: the motion planner (more info here), and the low level motion controller (more info here).