Home
- Connect your mobile phone and laptop to a common network.
- You can either turn on hotspot on your mobile phone and connect your laptop to that hotspot or you can connect both your laptop and mobile phone to any common hotspot.
- Open a terminal window on your laptop and run
mobot_spine.
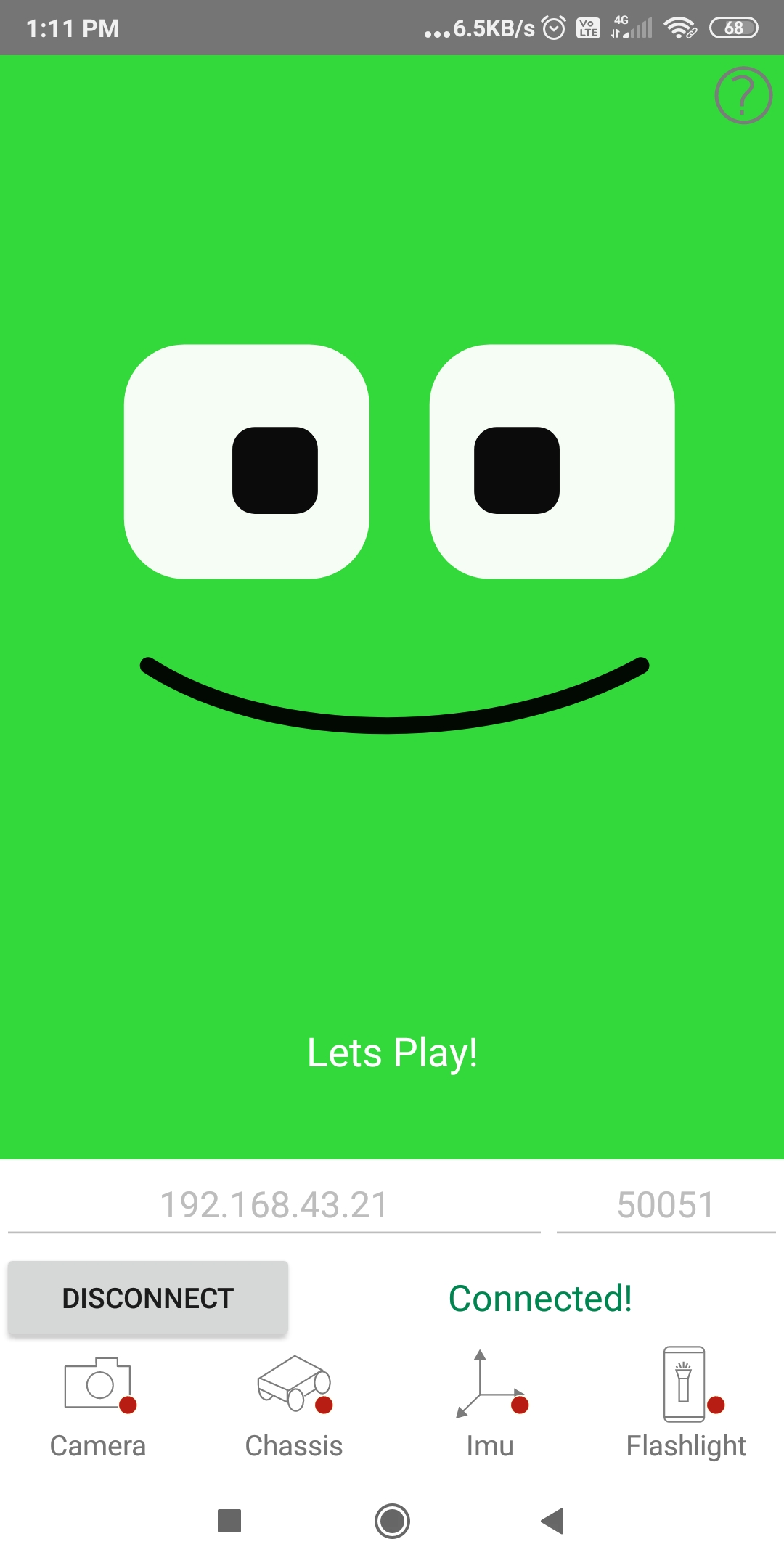
- Open the Mobot app on your mobile phone, enter the ip address and port of mobot_spine and press connect.
- Open a new terminal window and run
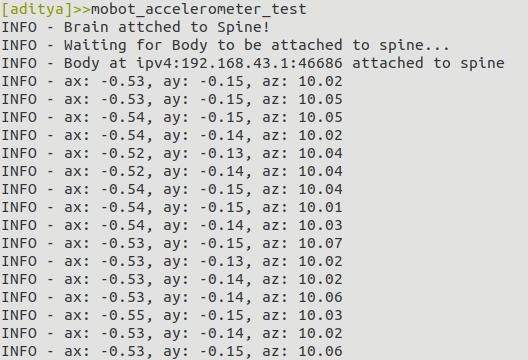
mobot_accelerometer_test$ mobot_accelerometer_test
- You should see accelerometer data printing on your terminal.
- In the mobot app you will notice that dot next to Imu turn green from red.
- Green: Streaming
- Red: Not Streaming
- Gray: Not Available
- To exit press ctrl+c
Similarly you can run mobot_magnetometer_test and mobot_gyroscope_test to see magnetometer and gyroscope data respectively.
- Open a new terminal window and run
mobot_flashlight_test
$ mobot_flashlight_test- Flashlight should be turned on on your mobile phone.
- To exit press ctrl+c
- Open a new terminal window and run
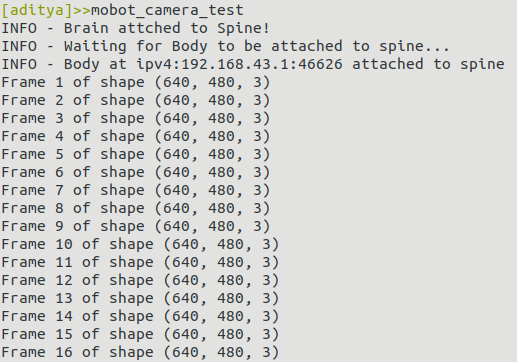
mobot_camera_test
$ mobot_camera_test- You should see the camera frames being received on your terminal.
- To exit press ctrl+c
- Open a new terminal window and run
mobot_chassis_test
$ mobot_chassis_test- Your terminal should display keys to move and turn the robot.
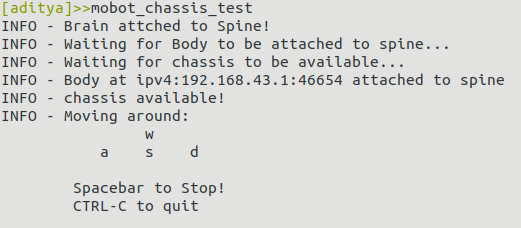
- Use your keyboard to move and turn the robot.
- To exit press ctrl+c
(Mobot Body) <--> (Mobot Spine) <--> (Mobot Brain)- Mobot Body: Sensors and Actuators arranged in a certain way (i.e. Chassis + "Mobile Phone")
- Mobot Brain: Intelligence that look at the sensor data and commands the actuator.
- Mobot Spine: Mediator between "Mobot Body" and "Mobot Brain" that helps them discover each other (i.e. mobot_spine).
Check Building Mobot Brain for programming your mobot.