Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Avoid a deadlock updating the network D-Bus tree (#966)
## Problem If the network service receives an `Apply` at the same time as any other request, it may get blocked. ## Solution Updating the tree must be done in a separate task. Otherwise, it could fight with an incoming request for the ObjectServer mutex, blocking the actions dispatching. ## Using tokio-console I decided to use [tokio-console](https://docs.rs/tokio-console/latest/tokio_console/) to make it easier to find the problem. This tool collects and displays information about the asynchronous tasks in your program. In the screenshot below you can see that the D-Bus `Set` dispatchers are blocked. 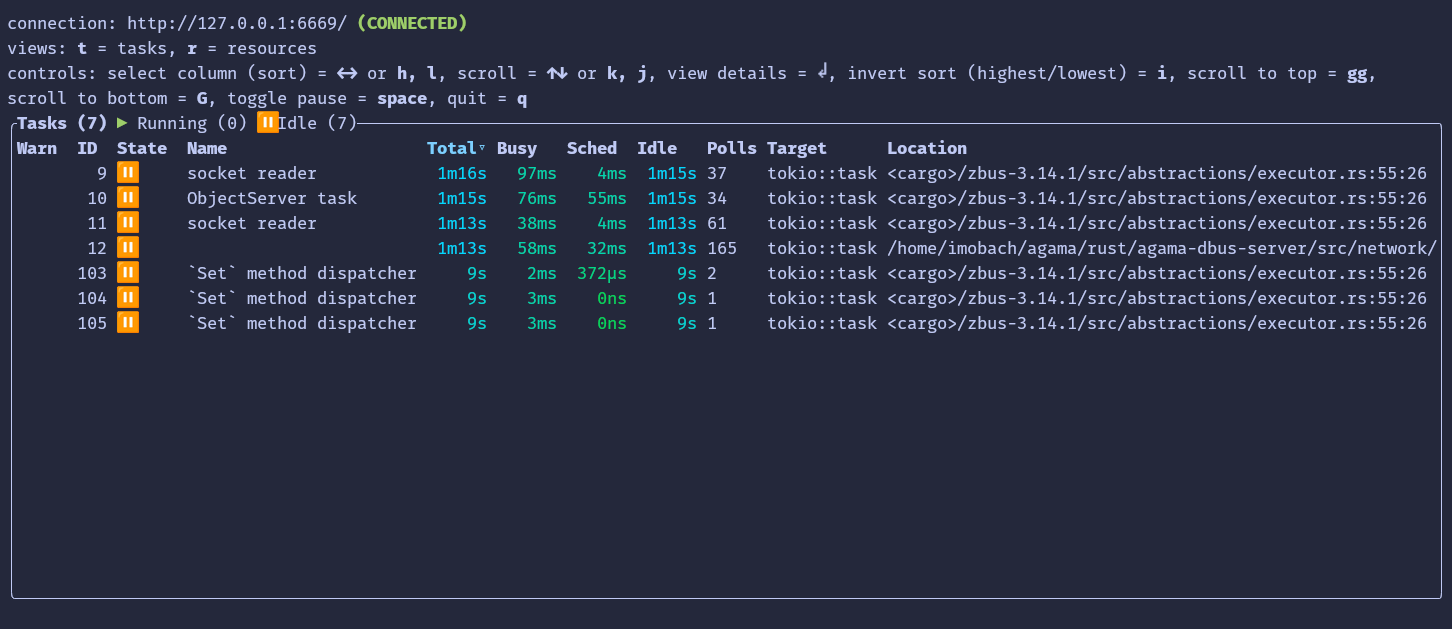 Once you find the problem, it is kind of "obvious", but it may take some time until you figure out what is happening. To use `tokio-console` you need to add some instrumentation to your program and, at this point, it implies adding some unstable Tokio APIs. So if you want to give it a try, you can try the code in the [tokio-console branch](https://github.com/openSUSE/agama/compare/tokio-console).
- Loading branch information