Home
Boteye visual-inertial process unit (VIPU) features visual SLAM, obstacle detection and object recognition. Our product manifests high precision, low latency, large range of detection distance, insensitivity to sunlight, multifarious object recognition and great accuracy. Researched and developed by world-leading scientists, the patented boteye VIPU combines various sensors, deep-learning technology and hardware optimization. A boteye VIPU can also be used so that it does not require hardware resource from the main system. It has already demonstrated multiple use cases such as automated guidance and obstacle avoidance in robotic systems, and head tracking in wearable products.
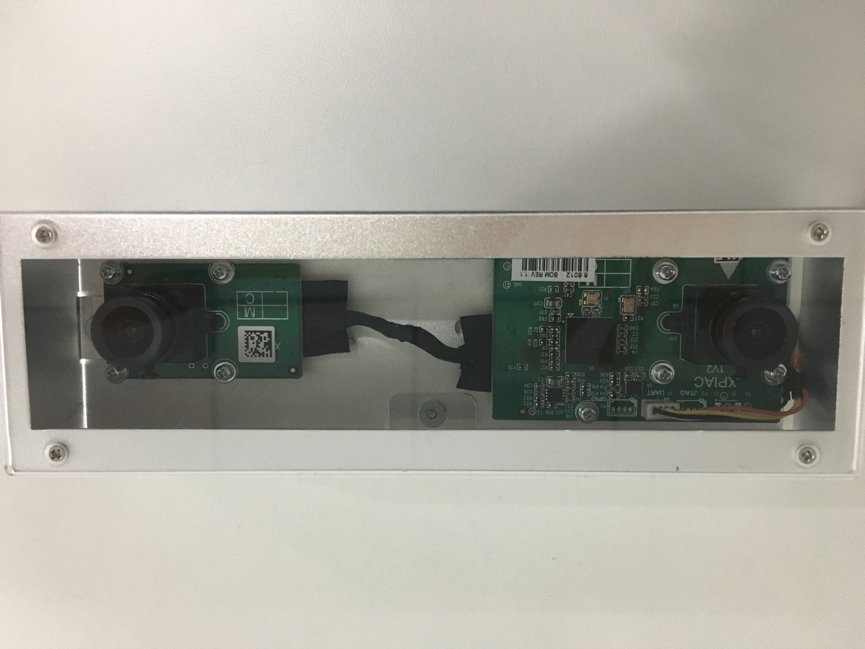 Above is the sample hardware provided by our hardware manufacturer.
Above is the sample hardware provided by our hardware manufacturer.
- The hardware is composed of two global shutter VGA cameras and a six-axis IMU
- Baseline (distance between the two cameras) is around 12.7cm (can be adjusted)
- Hardware synchronization between camera and IMU with precision of 10us
| boteye VIPU | |
|---|---|
| Camera | 90 – 170 FOV, Global Shutter, VGA |
| IMU | Gyroscope +- 1000 DPS Accelerometer +- 8 G |
| Driver | USB 3.0 or 2.0 supports x86 and ARM platform |
| Scenes | Home, office or department store |
| SLAM | six-axis, latency < 10us |
| SLAM Error | less than 1%/0.5% error rate without/with recorded map |
| Depth range | 0.2 - 50 meters |
| Depth Error | 1% of distance from camera to object |
| Object recognition, OCR, Face recognition | Through APIs from ai.baidu.com |