nRF24L01 multi-protocol RC transmitter project being used for JJRC/Eachine H8 mini to control over Serial. This project aims to develop a USB dongle to control the H8 directly from the PC using the nRF24L01+ module and later expand to control and/or charge multiple quadcopters with this custom hardware based on the Arduino Leonardo (Atmega32u4).
The main Arduino code is in the nRF24_multipro folder with the main sketch being nRF24_multipro.ino. The script to control the quad over serial is serial_test.py while the board files for the Quadstick are in the hardware_design folder.
This project is based on the work of perrystao: https://github.com/perrytsao/nrf24_cx10_pc
which in turn is based upon the awesome nrf24_multipro project by goebish: https://github.com/goebish/nrf24_multipro
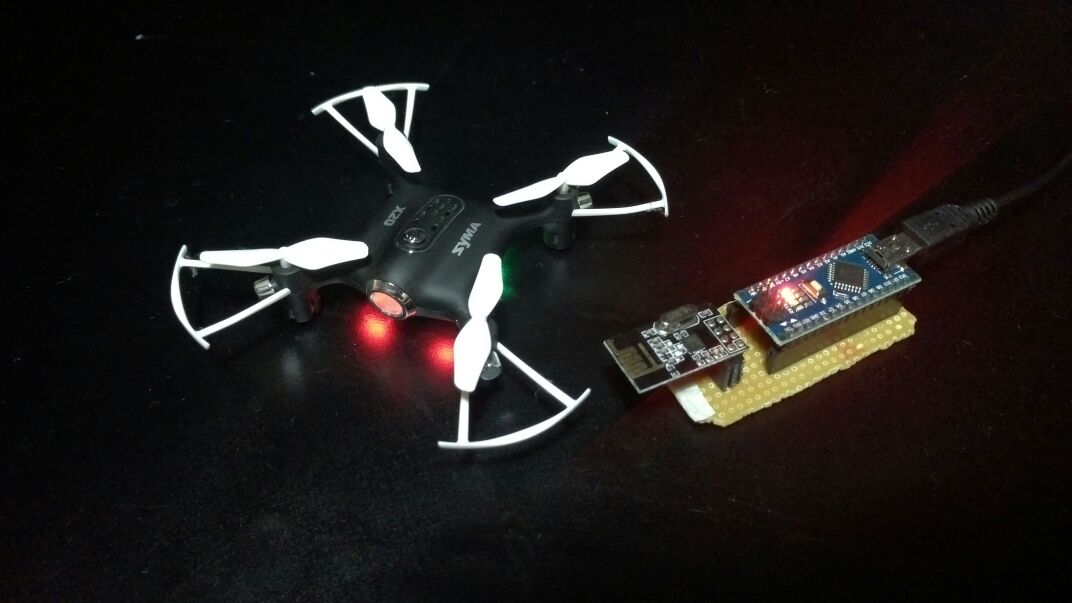
Arduino Nano and nRF24L01+ Module on perfboard to control Syma X20
| Arduino Uno/Nano | NRF24L01+ Module | nRF Pin No. |
|---|---|---|
| GND | GND | 1 |
| 3.3V | VCC | 2 |
| D5 (Digital 5) | CE | 3 |
| A1 (Analog 1) | CSN | 4 |
| D4 (Digital 4) | SCK | 5 |
| D3 (Digital 3) | MOSI | 6 |
| A0 (Analog 0) | MISO | 7 |
| Not Used | IRQ | 8 |
run export PYTHONPATH=. at the root of the project folder to run the files from terminal.
Why this isn't needed on Pycharm is because it sets it for you.