Map sparsification
Maplab offers several algorithms designed to reduce the computational/memory requirements of the map. That's particularly important when you would like to cover large areas or deal with a large number of mapping sessions.
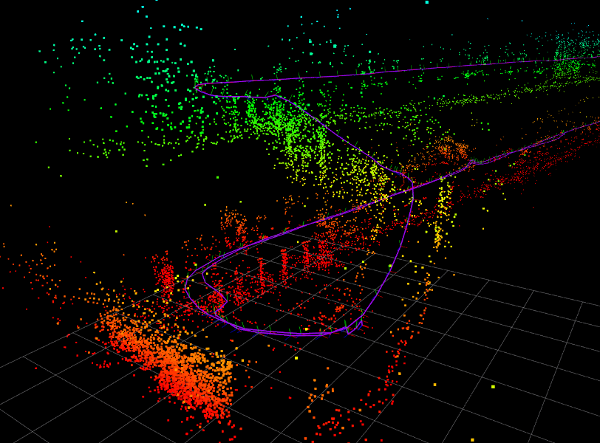
Let's start with an initial map - one of the maps of a multi-floor dataset:

To reduce the number of keyframes in the system (and, as a result, also remove some landmarks), you can use the keyframing command:
kfh
Keyframing is based on multiple criteria:
- maximum distance: if translation > threshold then adds a keyframe,
- maximum rotation: if rotation > threshold then adds a keyframe,
- number of keyframes: forces keyframes at every n-th keyframe,
- number of coobserved landmarks: adds a keyframe if the landmarks co-observed by two frames is smaller than a threshold.
Those parameters can be adapted using flags:
-
kf_distance_threshold_m, default 0.75 -
kf_rotation_threshold_deg, default 20 -
kf_every_nth_vertex, default 10 -
kf_min_shared_landmarks_obs, default 40
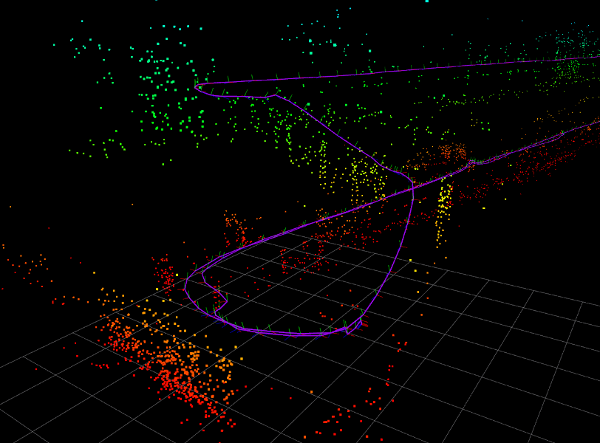
The resulting map should contain significantly fewer keyframes:
Map summarization removes the landmarks using an Integer Linear Programming optimization, using lpsolve solver. It tries to keep the landmarks that are most often observed while also maintaining a good coverage over the entire area.
To summarize to maps and only keep 5000 best landmarks, you can call:
lsparsify --num_landmarks_to_keep 5000
This reduces the number of landmarks and reduces the size of the map:
Maplab introduces a concept of a compact localization summary map - a minimal map representation that our loopclosure algorithm can operate on. Basically, it consists of landmark 3D positions, observation descriptors and a covisibility graph.
To export a localization summary map that can be used by ROVIOLI, just use the command:
generate_summary_map_and_save_to_disk --summary_map_save_path your_summary_map