o stands for Zero-Shot Autonomous Robots.

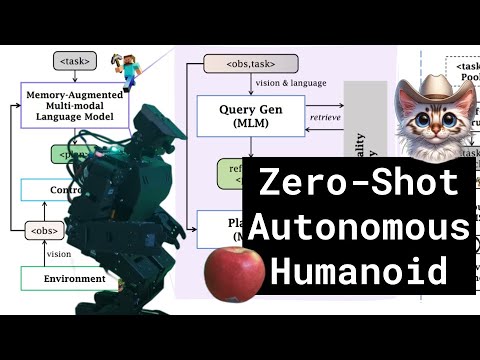
This repo uses model APIs to create a Zero-Shot Autonomous Robot. Individual robot behaviors are wrapped in asynchronous nodes (python) which are launched via scripts (bash). It's kind of like a more minimalist and simpler ROS. Four main types of models are used:
- LLM (Language Language Model) a
text2textmodel used for planning, reasoning, dialogue, and more! - VLM (Vision Language Model) - a
image2textmodel used for scene understanding, object detection, and more! - TTS (Text-to-Speech) a
text2audiomodel used for speech synthesis so the robot can talk. - STT (Speech-to-Text) a
audio2textmodel used for speech recognition so the robot can listen.
To get started follow the setup guide.
The models module contains code for different model apis. For example models/rep.py is for the open source Replicate API, and models/gpt.py is for the OpenAI API. More info on models.
The robots module contains code for different robots. For example robots/nex.py is for the HiWonder AiNex Humanoid. More info on robots.
The nodes module contains code for different nodes. For example nodes/look.py contains the loop used vision with a Vision Language Model. More info on nodes.
The params module contains code for different parameters. For example params/default.sh will load environment variables (params) that contain default values. More info on params.
If you are interested in contributing, please read the contributing guide.
@misc{zero-shot-robot-2023,
title={Zero-Shot Autonomous Robots},
author={Hugo Ponte},
year={2023},
url={https://github.com/hu-po/o}
}