Background on image moments
The moments of a shape are particular weighted averages (in statistics, "moments") of the pixel intensities. In physics they're the distribution of matter about a point or an axis etc.
They are usually described as a function f(x,y) which can just be read as
"the value (or intensity) of the pixel in an image at position (x,y)", so f is the 'image function'.
If the image is binary (e.g. a binary blob), then we'd say the image function f takes values in [0,1].
A moment of order p + q is defined for a 2D continuous function on a region as:
M_pq = ∫ x^p y^q f(x,y) dxdy
So if we talk about "first order moments" then we mean M_01, M_10,
M_01 = ∫ y f(x,y) dxdy
M_10 = ∫ x f(x,y) dxdy
and by "second order moments" we mean M_11, M_20, M_02
Since we have discrete pixels not a continuous function, in fact the integrals
just become summations over x and y. So in other words: moments M_pq counts
the pixels over an image f(x,y) and the 0'th moment is just the total count
of pixels in an image, i.e. its area (it's usually called the area moment for binary
images or otherwise the 'mass' of the image for grayscale etc.).
Image moments are sensitive to position, but by subtracting the average x and y position in the above equation we can obtain a translation-invariant "central moment".
μ_pq = ∫ (x-x̅)^p (y-y̅)^q f(x,y) dxdy
where
x̅ = M_10 / M_00 (first order x moment divided by the area moment)
y̅ = M_01 / M_00 (first order y moment divided by the area moment)
-
(x̅,y̅)is the centroid (a.k.a. centre of gravity)
So far so simple.
Second order moments M_20 and M_02 describe the "distribution of mass"
of the image with respect to the coordinate axes. In mechanics they're the
moments of inertia. Another mechanical quality is the radius of gyration
with respect to an axis, expressed as √(M_20 / M_00) and √(M_02 / M_00)
There are others: scale invariant moments and rotation invariant moments (the latter are a.k.a. Hu moments)
The one of interest for the code in this repo is a little more complicated.
The covariance matrix of an image can be obtained from second order central moments as below:
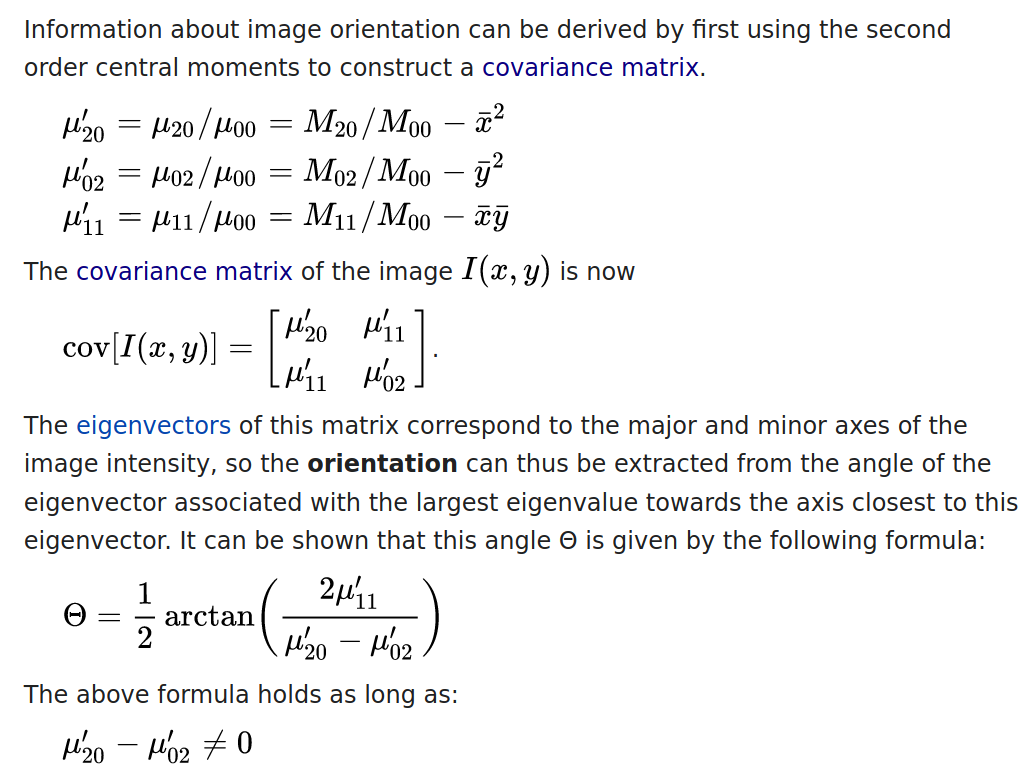
This is constructed in the blob_mean_and_tangent function of this library's
contours.py module, and then PCA is computed on it by Singular Value Decomposition.
(These are covered in most good introductions to linear algebra, I recommend Strang)
- See this article for a nice geometric interpretation of covariance, which makes this usage intuitive
In fact, the moments above are all geometric moments since the polynomial basis
is a standard power basis x^p multiplied by y^q.
If you want to read more, check out Flusser et al's book Moments and Moment Invariants in Pattern Recognition