Publications | Outreach | Geospatial | Python | SQL
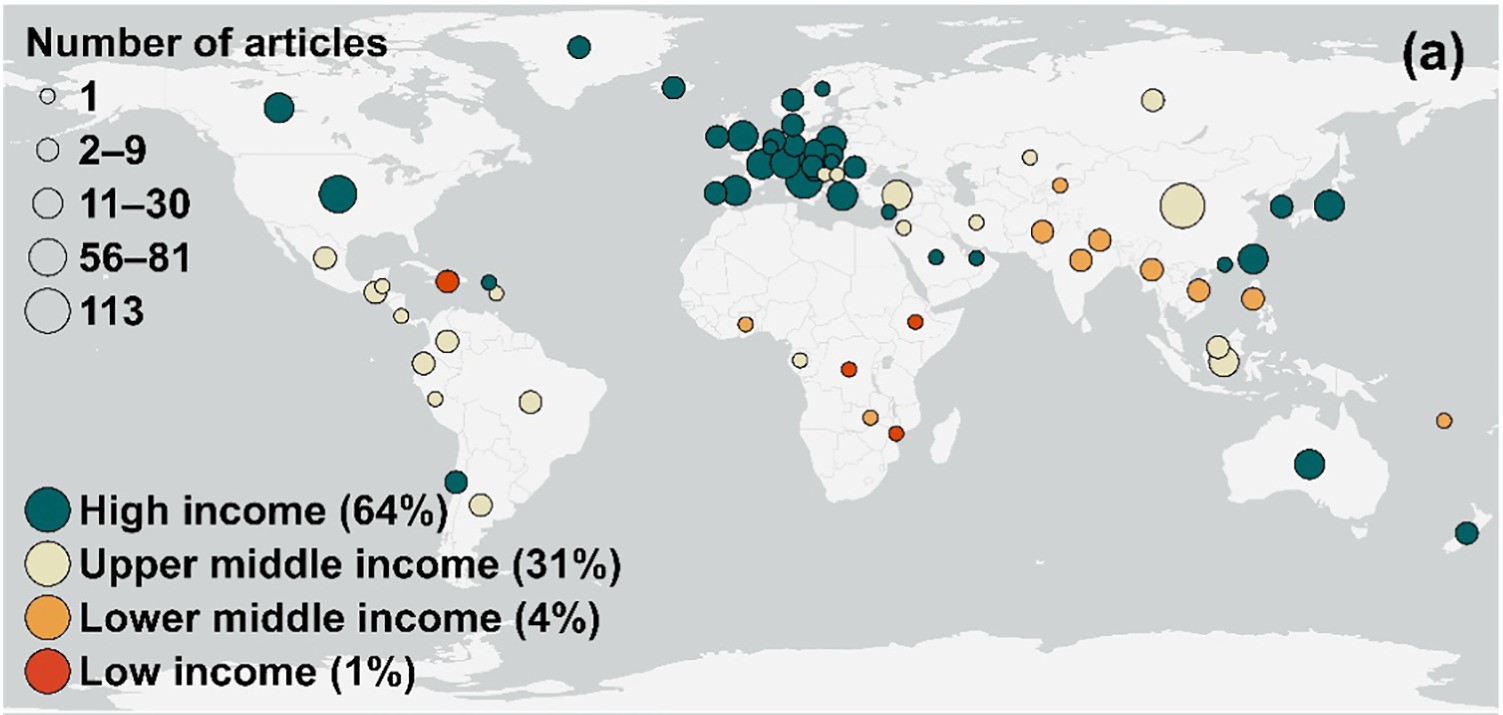
Remote sensing of natural hazard-related disasters with small drones: Global trends, biases, and research opportunities
Kucharczyk, M., & Hugenholtz, C. H. (2021). Remote Sensing of Environment, 264, 1–13.
Esri ArcGIS Pro Web of Science Scopus Mendeley
This study is a comprehensive review of drone-based remote sensing for supporting disaster management. We performed a systematic literature search using the Preferred Reporting Items for Systematic Reviews and Meta-Analyses methodology, resulting in 635 relevant articles from which we derived trends and critical research needs relating to geography, disaster management application, drone hardware, and drone remote sensing data type and analysis method. Based on the research gaps we identified, we recommended that future studies focus on: (i) earthquakes, floods, and cyclones and other windstorms due to higher loss of life and economic impacts; (ii) larger and urban study areas in low, lower-middle, and upper-middle income countries and territories to support vulnerable populations; (iii) under-demonstrated (and especially response-related) disaster management activities, which generally require observations of built features from urban environments; and (iv) data standards for integrating drone-based remote sensing with international disaster management methodologies.
Gao, M., Hugenholtz, C. H., Fox, T. A., Kucharczyk, M., Barchyn, T. E., & Nesbit, P. R. (2021). Scientific Reports, 11(1), 1–13.
Python
We globally mapped the proportion of time various drones can fly safely (termed “flyability”). Flyability was quantified by comparing historical wind speed, temperature, and precipitation data to manufacturer-reported thresholds of common commercial and weather-resistant drones with a Python-based computer simulation. Within this global dataset, we examined the 100 most populated cities where some on-demand drone services and applications such as delivery and emergency services may be applied commonly. Results indicated that global flyability is highest in warm and dry continental regions and lowest over oceans and at high latitudes. Median global flyability for common drones is low: 5.7 h/day or 2.0 h/day if restricted to daylight hours. Weather-resistant drones have higher flyability (20.4 and 12.3 h/day, respectively). An inverse analysis for major population centres showed the largest flyability gains for common drones can be achieved by increasing maximum wind speed and precipitation thresholds from 10 to 15 m/s and 0–1 mm/h, respectively.

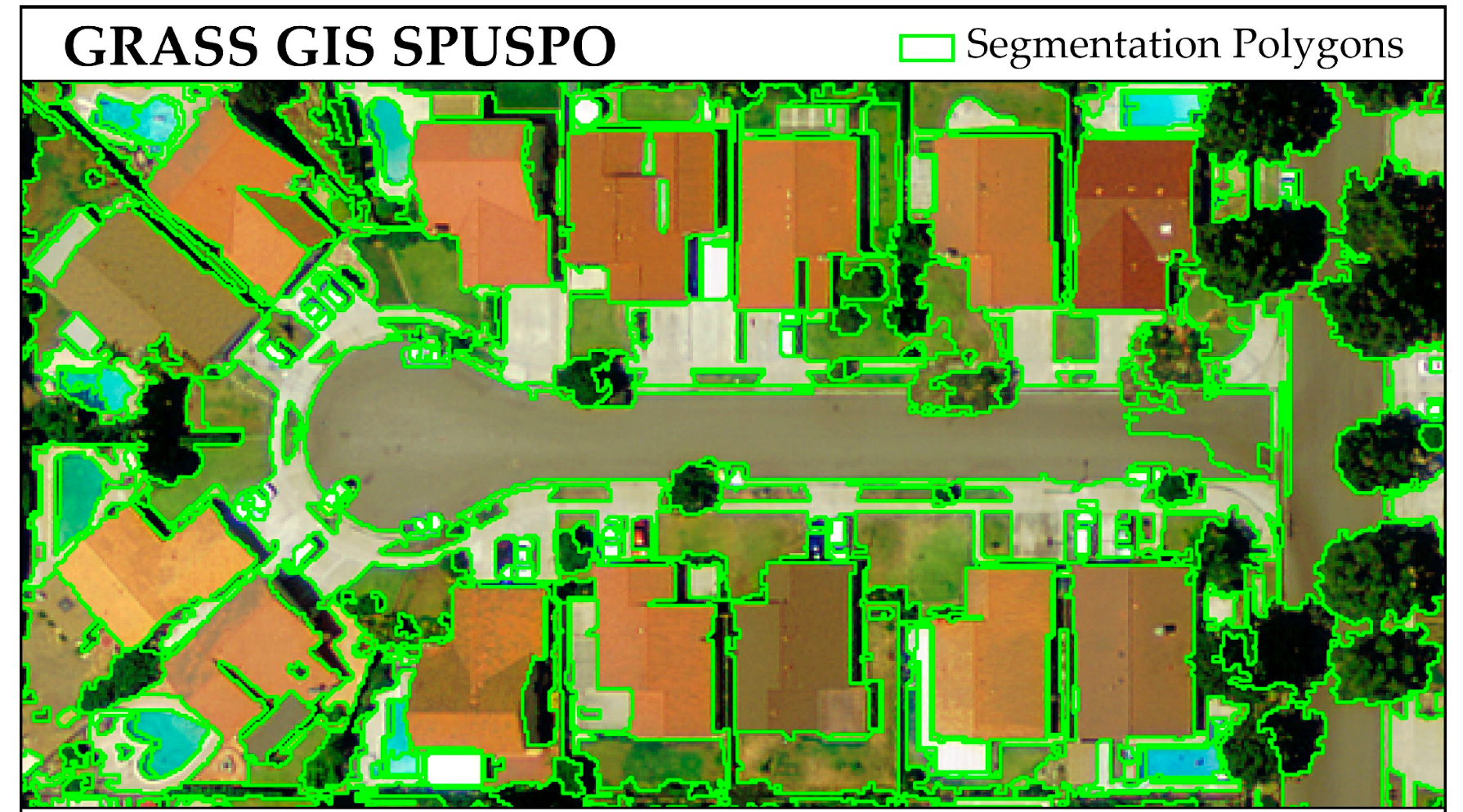
Kucharczyk, M., Hay, G. J., Ghaffarian, S., & Hugenholtz, C. H. (2020). Remote Sensing, 12(12), 1–33.
Esri ArcGIS Pro GRASS GIS Trimble eCognition ENVI FX
Here, we described the theoretical foundations of geographic object-based image analysis (GEOBIA) and provided a comprehensive overview of the methodological workflow. Building on this foundation, we then reviewed recent research on the convergence of GEOBIA with deep convolutional neural networks, which we suggested is a new form of GEOBIA. Overall, this study described the past, present, and anticipated future of GEOBIA in a novice-accessible format, while providing innovation and depth to experienced practitioners.
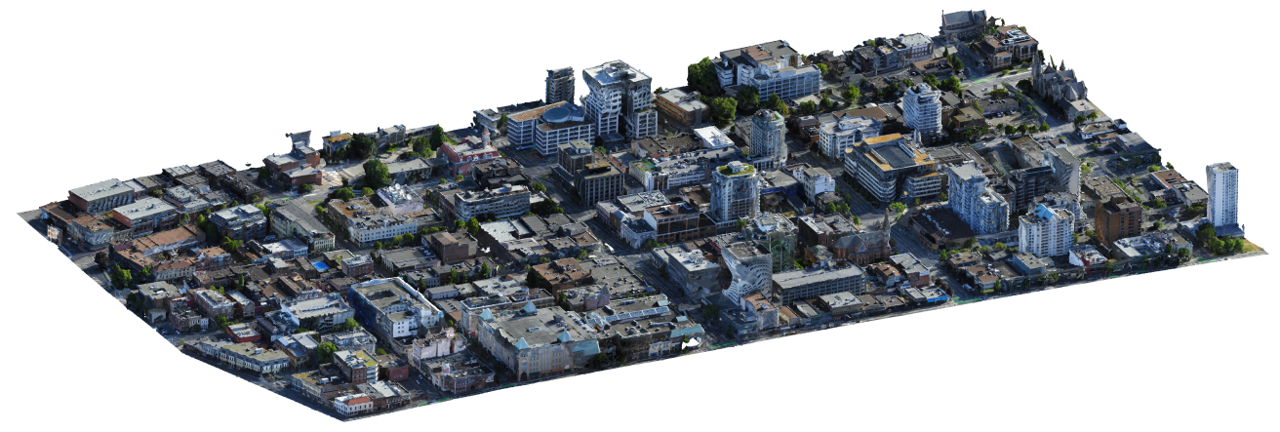
Kucharczyk, M., & Hugenholtz, C. H. (2019). Natural Hazards and Earth System Sciences, 19(9), 2039–2051.
Esri ArcGIS Online Esri ArcMap SenseFly eMotion Pix4Dmapper Pro CloudCompare Google Earth Pro
This study represents the first drone mapping mission over an urban area approved by Canada’s aviation authority. The goal was to assess the quality of the pre-disaster 3D data in the context of geospatial accuracy and building representation. To plan and acquire regulatory approval for the mission, ArcGIS Online was used to produce a web map showing municipal building footprints and heights, critical infrastructure, helipads, and proposed drone flight areas. After approval, the images were acquired with a senseFly eBee Plus fixed-wing drone with real-time kinematic/post-processed kinematic functionality. Image processing with structure-from-motion photogrammetry produced digital surface models (DSMs) and 3D models. DSM vertical accuracy was assessed using 47 ground-surveyed checkpoints and hypothesis testing, while building representation in the 3D model was evaluated using CloudCompare and Google Earth Pro. Results indicated that the spatial accuracies achieved with this drone would allow for sub-meter building collapse detection, but the non-gimbaled camera was insufficient for capturing building facades.
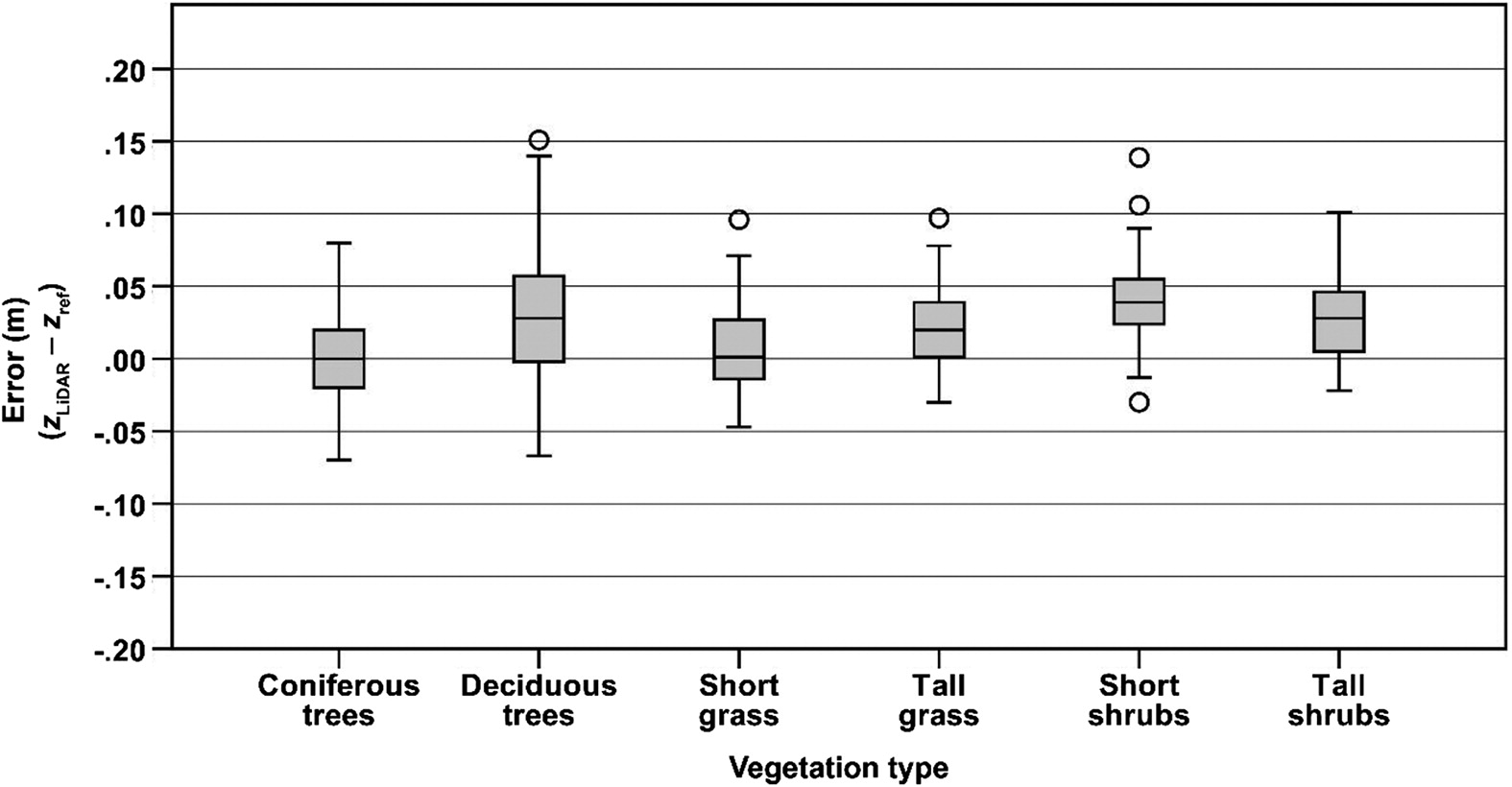
Kucharczyk, M., Hugenholtz, C.H., & Zou, X. (2018). Journal of Unmanned Vehicle Systems, 6(4), 212-234.
Esri ArcMap Trimble R4 GNSS Nikon DTM-522 Total Station CSRS-PPP Trimble Business Center Minitab IBM SPSS Statistics
We assessed the horizontal and vertical accuracy of light detection and ranging (lidar) data acquired from a drone at a field site with six vegetation types: coniferous trees, deciduous trees, short grass, tall grass, short shrubs, and tall shrubs. Accuracy was evaluated using 20 horizontal and 445 vertical checkpoints surveyed with real-time kinematic GNSS and a total station, followed by precise point positioning GNSS processing, Hough Transform, and hypothesis testing. Results showed that horizontal accuracy and vegetated vertical accuracy at the 95% confidence level were 0.05 and 0.24 m, respectively. Median vertical errors significantly differed among 10 of 15 vegetation type pairs, highlighting the need to account for variations of vegetation structure. According to the 2015 American Society for Photogrammetry and Remote Sensing standards, the reported errors fulfilled the requirements for mapping at the 2 and 8 cm horizontal and vertical class levels, respectively.
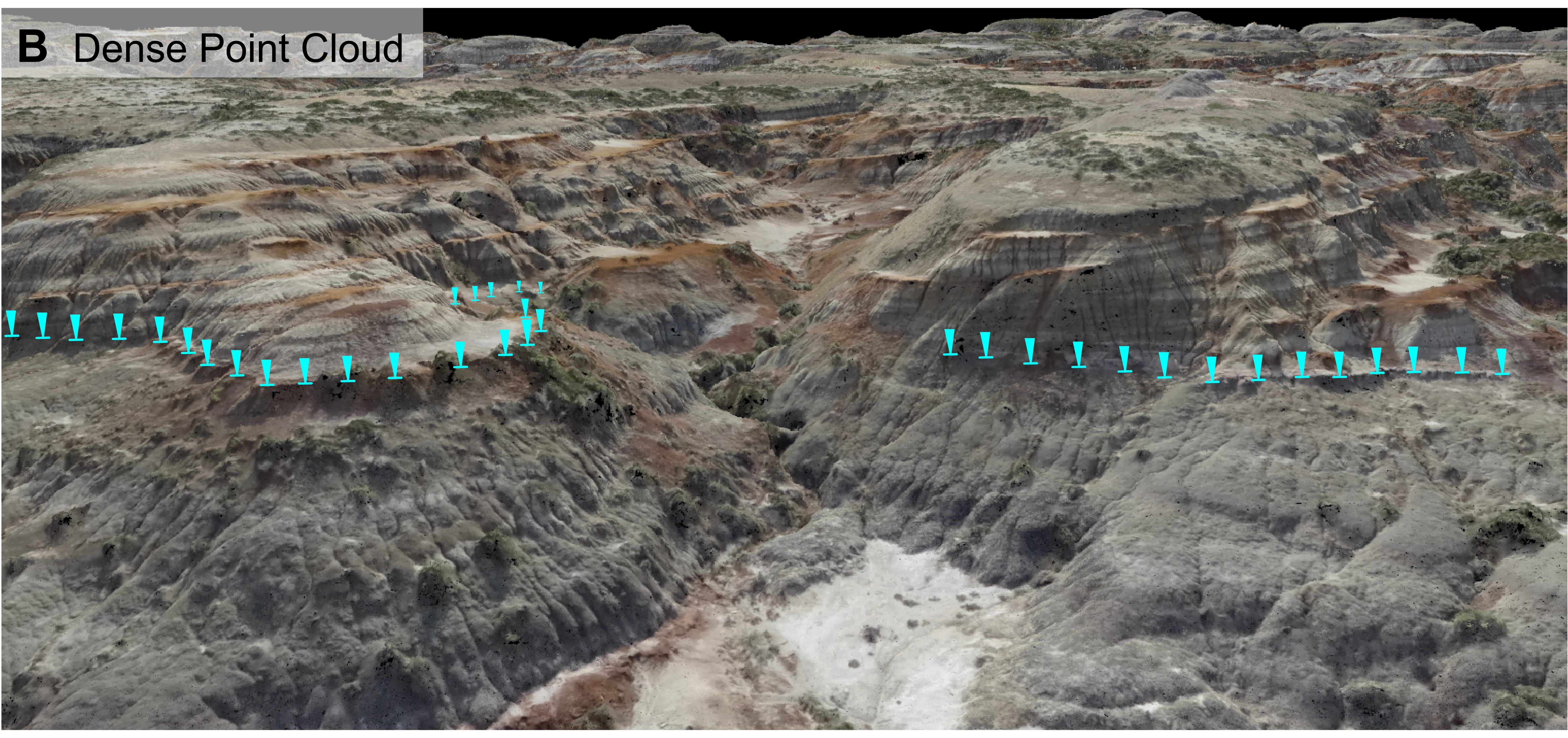
3-D stratigraphic mapping using a digital outcrop model derived from UAV images and structure-from-motion photogrammetry
Nesbit, P.R., Durkin, P.R., Hugenholtz, C.H., Hubbard, S.M., & Kucharczyk, M. (2018). Geosphere, 14(6), 2469–2486.
SenseFly eMotion Pix4Dmapper Pro
This study examined the use of drone-based photogrammetry (structure-from-motion) for geologic mapping. We used structure-from-motion to develop a 3D digital outcrop model (DOM) of an Upper Cretaceous channel-belt sequence in Dinosaur Provincial Park (southeastern Alberta, Canada). Using the 3D DOM, we delineated the lower contact of the channel-belt sequence, created digital sedimentary logs, and estimated facies with similar conviction to field-based estimations (±4.9%). Overall, we found that measurements and observations derived from the 3D DOM were commensurate with conventional ground-based mapping techniques, but they had the added advantage of lateral continuity, which aided interpretation of stratigraphic surfaces and facies.
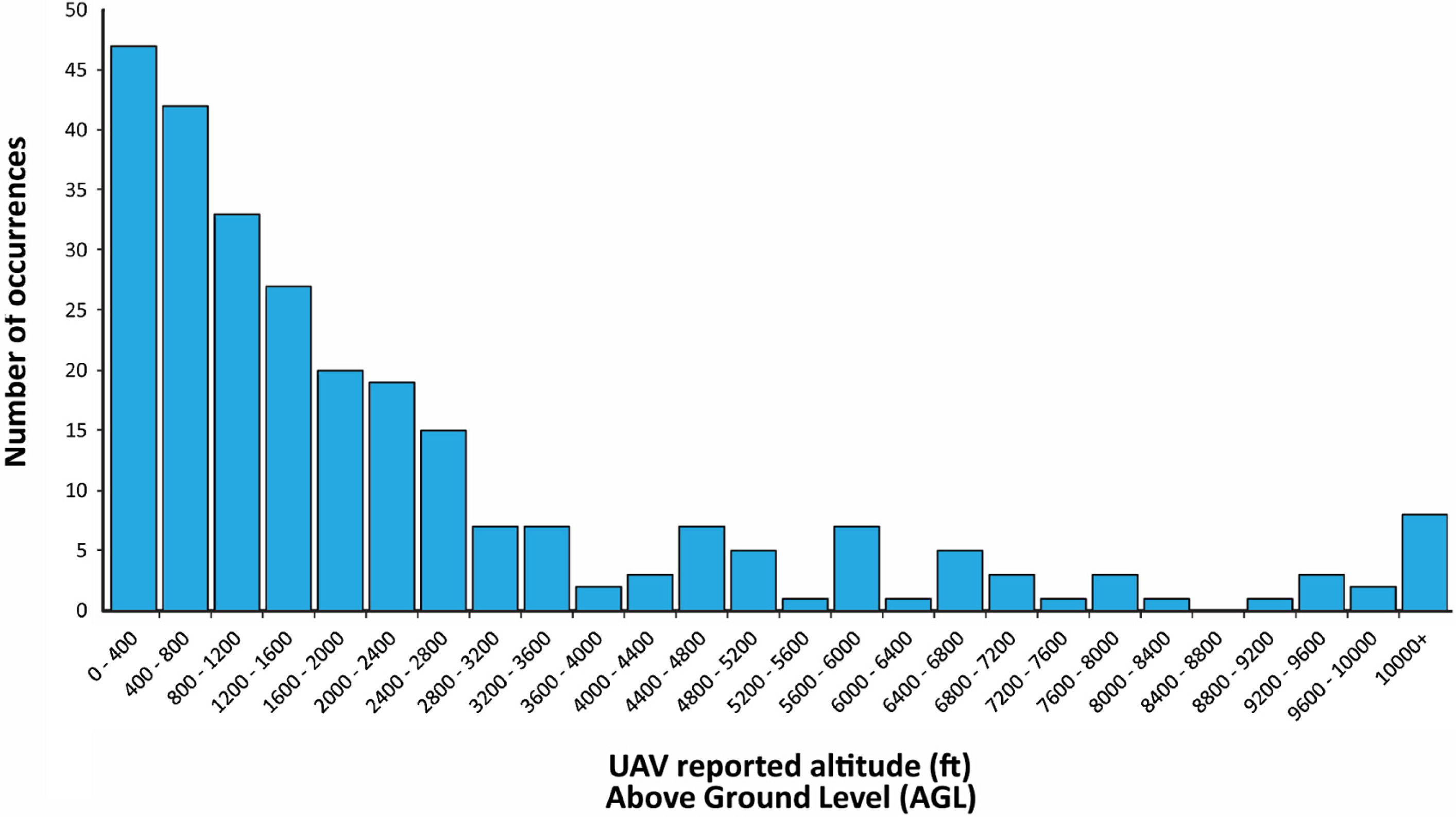
Nesbit, P. R., Barchyn, T. E., Hugenholtz, C. H., Cripps, S., & Kucharczyk, M. (2017). Journal of Unmanned Vehicle Systems, 5(2), 51-61.
Transport Canada CADORS
To gain insight into the types of incidents that were occurring with small drones in Canada, we analyzed data from Transport Canada’s Civil Aviation Daily Occurrence Reporting System (CADORS). Collectively, the CADORS data indicated that the overwhelming majority of drone incidents reported in Canada were airspace violations. The number of sightings dramatically increased after 2013, suggesting the problem of airspace infractions was real and increasing in prevalence. These results can guide future risk mitigation measures, hardware and software solutions, and educational campaigns to increase airspace safety.
Spatial accuracy of UAV-derived orthoimagery and topography: comparing photogrammetric models processed with direct georeferencing and ground control points
Hugenholtz, C.H., Brown, O., Walker, J., Barchyn, T.E., Nesbit, P.R., Kucharczyk, M., & Myshak, S. (2016). Geomatica, 70(1), 21-30.
Esri ArcMap Trimble R6 GNSS SenseFly eMotion Postflight Terra 3D
We compared the spatial accuracy of two nearly identical drones with differing onboard GNSS equipment: one with a survey-grade real-time kinematic (RTK) GNSS receiver (RTK drone), and the other with a lower-grade GPS receiver (non-RTK drone). Spatial accuracy was quantified using 17 horizontal and 180 vertical checkpoints surveyed with RTK GNSS, followed by hypothesis testing. The horizontal and vertical accuracy improved substantially with the RTK drone, effectively reducing the horizontal and vertical root-mean-squared error values by 1 to 2 orders of magnitude compared to the non-RTK drone. Importantly, the horizontal accuracy of the RTK drone data processed via direct georeferencing was equivalent to the horizontal accuracy of the non-RTK drone data processed with ground control points (GCPs), but the vertical error of the RTK drone data was 2 to 3 times greater than the vertical error of the non-RTK drone data with GCPs. Overall, these results suggested that direct georeferencing with the RTK drone can achieve a horizontal accuracy comparable to that obtained with a network of GCPs, but for topographic (vertical) measurements requiring the highest achievable accuracy, researchers and practitioners should use GCPs.

Kucharczyk, M., & Hugenholtz, C. H. (2021). The Conversation.
Following our publication of Remote sensing of natural hazard-related disasters with small drones, we published a journalistic article in The Conversation to share our work with the public.

Kucharczyk, M., Hugenholtz, C. H., Gao, M., Nesbit, P. R., Barchyn, T. E., & Fox, T. A. (2021). The Conversation.
Following our publication of Weather constraints on global drone flyability, we published a journalistic article in The Conversation to share our work with the public.

Podcast Guest (2023). Esri Canada Geographical Thinking Podcast.
I had an opportunity to be a guest on Esri Canada’s Geographical Thinking podcast, where I spoke with Guan Yue about using deep learning for post-disaster damage assessment.
<iframe allow="autoplay *; encrypted-media *; fullscreen *; clipboard-write" frameborder="0" height="175" style="width:100%;max-width:660px;overflow:hidden;border-radius:10px;" sandbox="allow-forms allow-popups allow-same-origin allow-scripts allow-storage-access-by-user-activation allow-top-navigation-by-user-activation" src="https://embed.podcasts.apple.com/ca/podcast/geoai-for-damage-assessment-in-the-wake-of-a-disaster/id1540357358?i=1000604553886&theme=light"></iframe>Automated mapping of hurricane roof damage: An end-to-end Esri ArcGIS Pro workflow using deep learning and drone imagery
Kucharczyk, M. (2023). ArcGIS StoryMaps.
Winning three awards from the International Statistical Institute, Esri, and Esri Canada, this StoryMap describes my workflow for automated post-storm roof damage mapping using ArcGIS Pro, ArcGIS API for Python, AI, and aerial imagery.

Falahatkar, H., Ogunleye, S., & Kucharczyk, M. (2023). Esri Canada Centres of Excellence App Challenge.
I participated in the 2023 Esri Canada Centres of Excellence App Challenge. My team and I built Canada’s Conservation Tracker: an app that provides information about protected and other conserved areas in Canada. I created the video below to introduce the app.
<iframe allow="autoplay *; encrypted-media *; fullscreen *; clipboard-write" frameborder="0" height="282" style="width:100%;max-width:660px;overflow:hidden;border-radius:0px;" sandbox="allow-forms allow-popups allow-same-origin allow-scripts allow-storage-access-by-user-activation allow-top-navigation-by-user-activation" src="https://www.youtube.com/embed/aZlWpVRDyDk?si=M1CeC2s6TeMUIdtL"></iframe>Kucharczyk, M. (2023). Esri Canada Centres of Excellence Blog.
I wrote a blog post about Esri's Student Assistant program to encourage others to apply.

Q&A Guest (2023). Esri Canada Education & Research.
I participated in a Q&A with Krista Amolins of Esri Canada to discuss my experience at the 2022 Esri User Conference, where I received an Esri Young Scholar Award, presented my deep learning research, and served as a student assistant.

Esri ArcGIS Dashboards
I participated in the 2023 Esri Canada Centres of Excellence App Challenge, which is an annual one-week competition that engages teams of students at each of the Esri Canada GIS Centers of Excellence in the creation of innovative GIS applications using Esri technology and open data to address a specific theme. The theme of 2023 was "Conservation and Protected Areas or Urban Ecology". My team and I built Canada’s Conservation Tracker: an app that provides information about protected and other conserved areas in Canada. Overall, Canada’s Conservation Tracker supports the monitoring of Canada’s progress towards its 2025 conservation targets and allows users to investigate trends in conservation with respect to factors such as time, geography, and governance.

Esri ArcMap Trimble R4 GNSS Nikon DTM-522 Total Station CSRS-PPP Trimble Business Center Minitab IBM SPSS Statistics ENVI MCC-LIDAR CloudCompare
For my MSc thesis, I evaluated the accuracy of drone-based light detection and ranging (drone-lidar) and structure-from-motion photogrammetry (drone-sfm) in six vegetation types: grasses (short and tall), shrubs (short and tall), and trees (deciduous and coniferous). Data processing included point cloud classification and interpolation to produce digital terrain models and digital surface models, followed by raster differencing to calculate digital canopy height models. Accuracy was assessed using ground reference data (i.e., real-time kinematic GNSS, total station, tape measure) and statistical evaluation (i.e., descriptive statistics, hypothesis testing). Results indicated drone-lidar was more accurate in estimating ground elevation in all vegetation types, while vegetation height accuracy was higher for some types with drone-sfm. Drone-lidar consistently sampled sub-canopy tree structure, while drone-sfm only captured tree tops.

Esri ArcMap rapidlasso LAStools
Between September 9 and 16, 2013, Boulder, Colorado (USA) experienced heavy and persistent rainfall exceeding 450 mm that resulted in flash floods, landslides, and debris flows. The flood was a 1000-year precipitation event in which eight people died and infrastructure damage exceeded two billion dollars. Using light detection and ranging (lidar) data acquired over Boulder before and after the flood, I created digital terrain models and performed topographic change detection. I then quantified erosional and depositional volumes along a stream channel and extracted aspects of possible debris flows.

Esri ArcMap R RStudio MATLAB PCI Geomatica
On September 7, 2017, Category 5 Hurricane Irma struck Sint Maarten (the Caribbean). Using a single band of a drone-derived RGB orthomosaic acquired after the hurricane, I trained classification models to predict the presence or absence of roof damage. First, I conducted variogram analysis of sample damaged buildings to assess the spatial autocorrelation of pixel values. The single band image was then used to extract grey level co-occurrence matrix (GLCM) texture measures from buildings with intact roofs and buildings with damaged/missing roofs. Since buildings with damaged/missing roofs appeared to have greater contrast and disorder of pixel values than those with intact roofs, I hypothesized that the GLCM textures relating to contrast and orderliness would be strong predictors of roof damage. Several univariate logistic regression and random forest models were trained and evaluated. The random forest model that used entropy (an orderliness-related GLCM texture) as the predictor resulted in the highest accuracy: 97.5%.

Python JupyterLab pandas numpy scipy matplotlib seaborn scikit-learn statsmodels
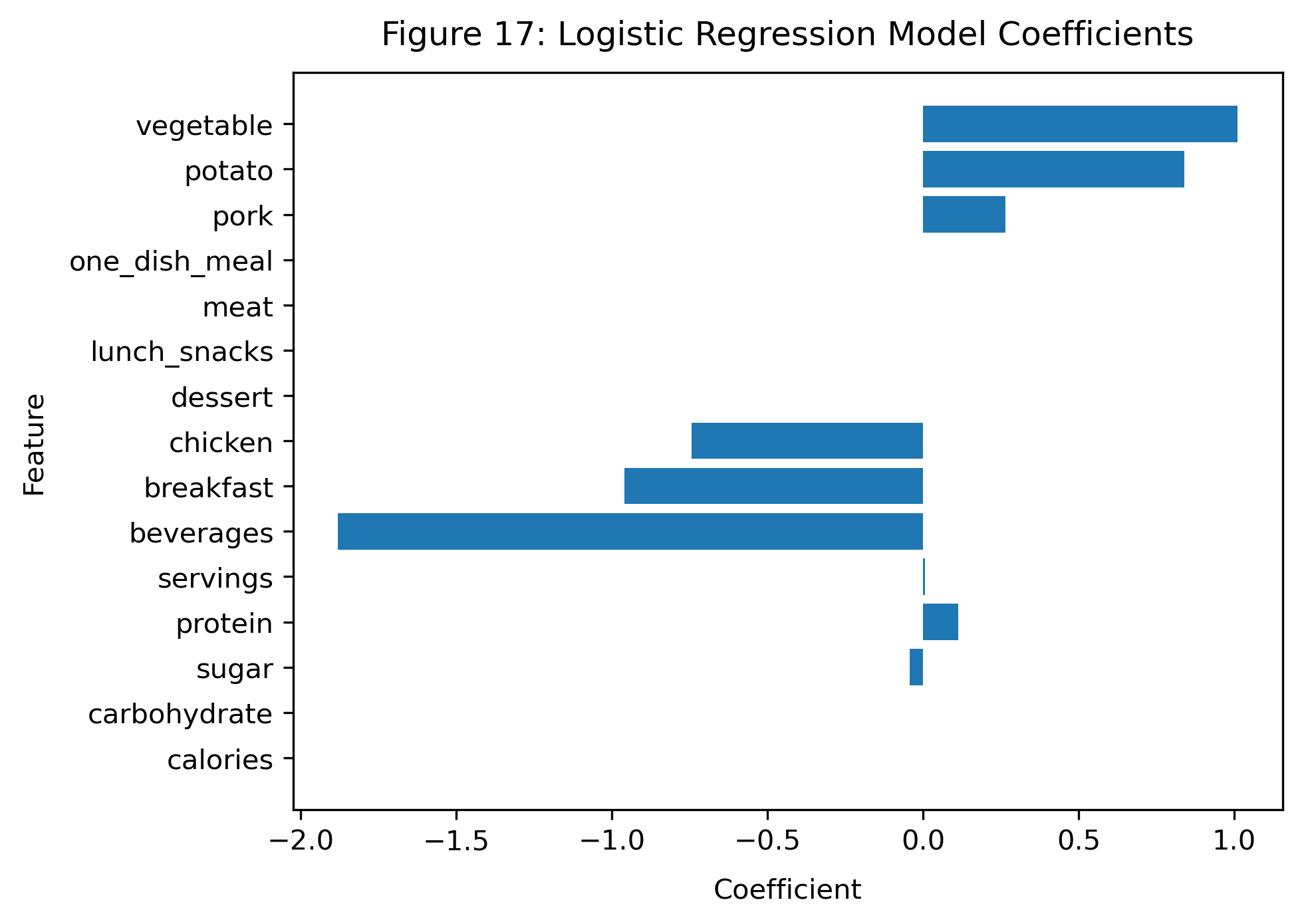
I performed exploratory data analysis, data cleaning, data transformation, and binary classification using Python to predict which recipes would lead to high traffic on the website of a company that sells meal planning and ingredient delivery services. Repeated stratified k-fold cross-validation and grid search were used for model selection and hyperparameter tuning. The logistic regression model achieved an accuracy of 81% and revealed which recipe attributes are associated with high and low website traffic.
Python JupyterLab pandas numpy scipy matplotlib seaborn scikit-learn statsmodels
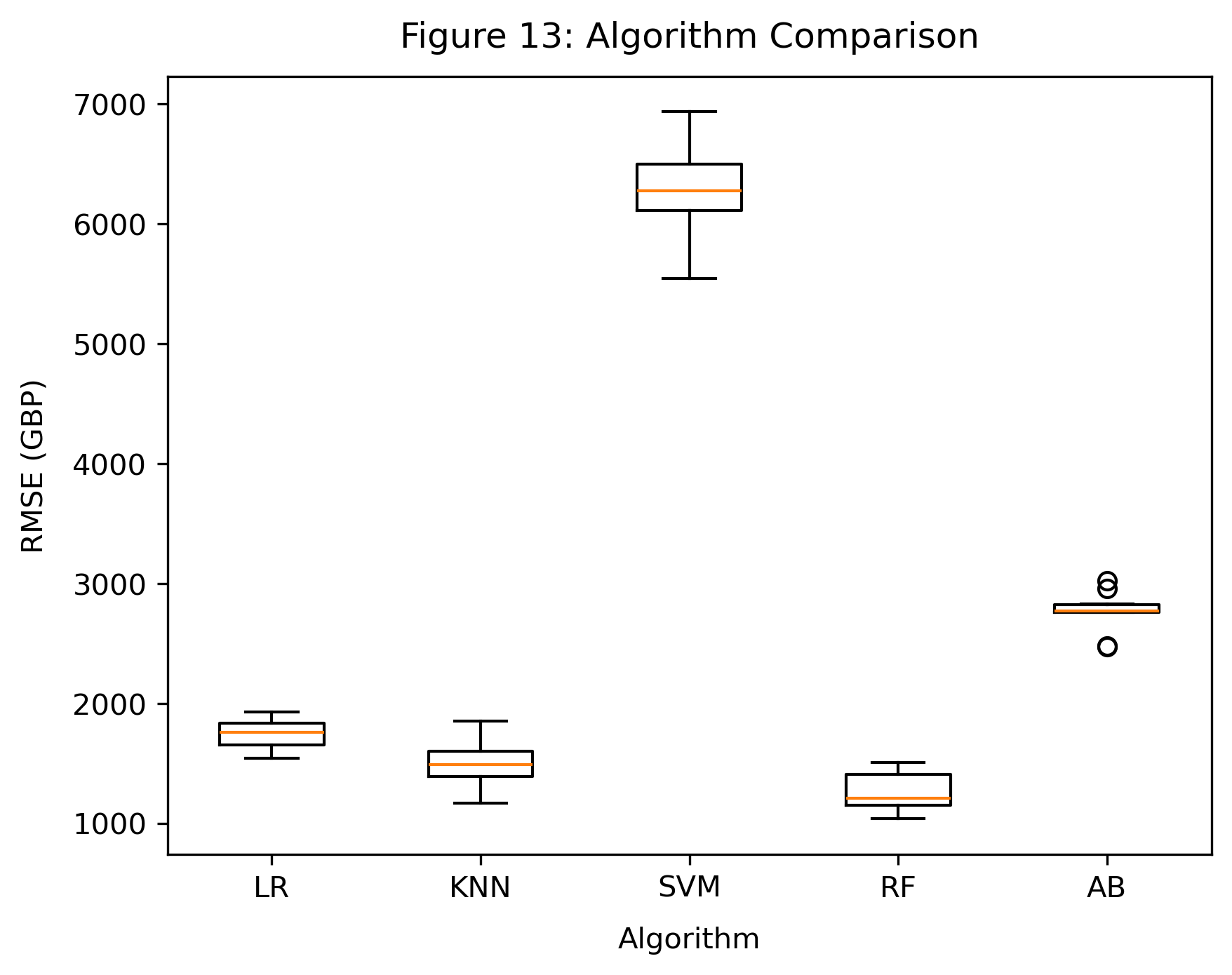
I performed exploratory data analysis, data cleaning, data transformation, and regression using Python to predict used car prices. K-fold cross-validation and grid search were used for model selection and hyperparameter tuning. The random forest model achieved a root-mean-squared error of 1210 GBP, R2 of 0.96, and predicted 78% of prices within 10% of their actual values.
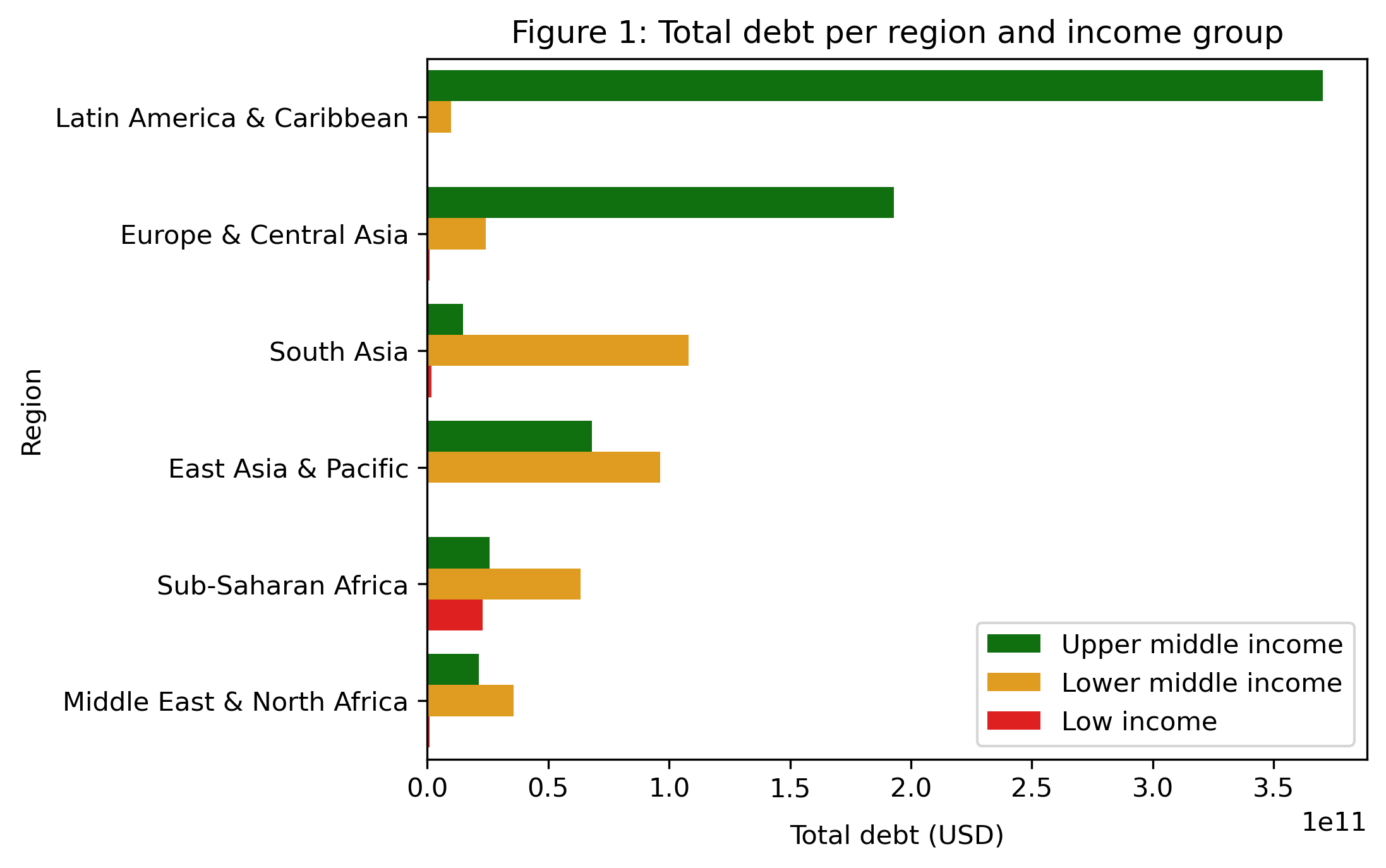
SQL Python JupyterLab pandas pandas-gbq matplotlib seaborn
The International Debt Statistics dataset by The World Bank has reported the external debt of low- and middle-income countries and regions each year since 1970. Google hosts the International Debt Statistics as a public BigQuery dataset called International Debt. After inspecting the international_debt table in the BigQuery dataset, I found that all 3.28 million rows had null year values and 94% of the rows had null debt values. In total, there were 138,152 rows with non-null and non-zero debt values, of which 2,467 were unique. The unique rows were grouped and joined with other tables in the dataset to determine the highest-debt countries, total debt owed by all countries, and debt per income group, region, and debt indicator. Due to the null debt and year values in the international_debt table, the BigQuery dataset currently appears limited in its use for exploring aggregate debt and temporal aspects. If the BigQuery dataset is fixed, the SQL queries can be rerun to derive accurate estimates.
Hosted on GitHub Pages — Theme by orderedlist