CodeCell is a family of tiny boards that help you miniaturize your DIY robots, wearables, and IoT projects with ease! Designed for makers, each CodeCell features an Arduino-compatible ESP32 microcontroller, onboard sensors, and smart power management - all programmable over a standard USB-C cable. The USB-C port also charges the LiPo battery that connects directly to the onboard connector.
All CodeCell modules are supported by the CodeCell Arduino Library, which provides simple, ready-to-use functions for light, proximity, motion, and power management.
You can even connect your CodeCell to our companion MicroLink App to add wireless sliders, buttons, joysticks, real-time sensor data, and a live 20-character display - Perfect for debugging!
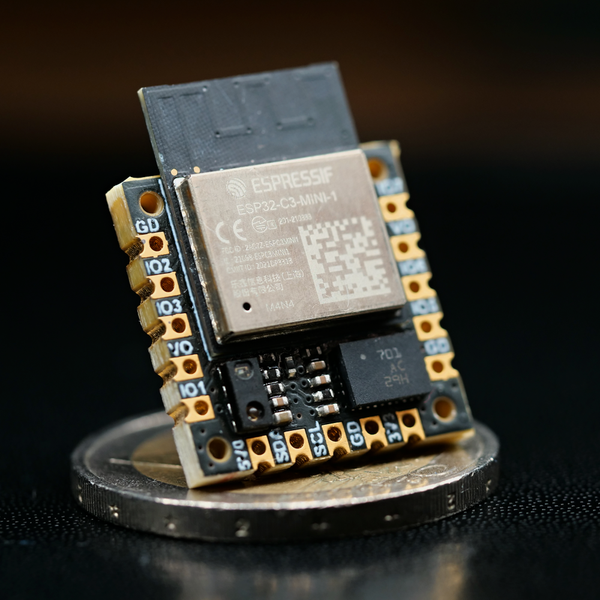
Each version of CodeCell shares the same compact 1.85 cm (C3/C6) or 2.25 cm (C6 Drive) form factor and includes:
- USB-C Port – for programming, serial communication, and battery charging.
- LiPo Connector – works with the included cable and the optional 170 mAh 20C battery (1.25 mm pitch).
- BQ24232 Power Management – enables dynamic power-path control for simultaneous operation and charging.
- Programmable GPIO/PWM/ADC/I2C Pins – expand your project with additional sensors, displays, or actuators.
- CodeCell Library Support – easy Arduino functions for reading sensors, LEDs, PWM, and sleep triggers.
- MicroLink App Integration – wireless control and real-time feedback from your phone.
- Sensors – includes a VCNL4040 light/proximity sensor and the C3/C6/C6-Drive also include a BNO085 9-axis IMU motion sensor with onboard sensor-fusion algorithms for advanced orientation, motion, and activity detection.
Available Versions:
| Model | Microcontroller | Features | Typical Use |
|---|---|---|---|
| CodeCell C3 Light | ESP32-C3-MINI-1-N4 | 4MB Flash, Wi-Fi 4 + BLE 5, LiPo Charging via USB-C, Light + Proximity Sensor | Basic sensing and IoT projects |
| CodeCell C3 | ESP32-C3-MINI-1-N4 | 4MB Flash, Wi-Fi 4 + BLE 5, LiPo Charging via USB-C, Light + Proximity Sensor + 9-Axis IMU Motion Sensor | Robotics & Wearables |
| CodeCell C6 | ESP32-C6-MINI-1-H8 | 8MB Flash, Wi-Fi 6 + BLE 5 + Zigbee, LiPo Charging via USB-C, Light + Proximity + 9-Axis IMU Sensor | Robotics & Wearables with Low-Power Modes |
| CodeCell C6 Drive | ESP32-C6-MINI-1-H8 | 8MB Flash, Wi-Fi 6 + BLE 5 + Zigbee, LiPo Charging via USB-C, Light + Proximity + 9-Axis IMU Sensor, Dual H-Bridge Motor Drivers | All-in-One Robotics Controller |
- CodeCell module (C3 Light / C3 / C6 / C6 Drive)
- Four M1.2 screws
- Female headers (optional soldering)
- 1.25 mm battery cable
- Optional 170 mAh LiPo battery (add-on)
Get started and explore tutorials here.
Make sure the ESP32 boards package is installed
(Boards Manager → search for "esp32" by Espressif).
- Board: ESP32C3 Dev Module
- USB CDC On Boot: Enabled // Required for Serial over USB
- CPU Frequency: 160 MHz
- Flash Size: 4 MB (32 Mb)
- Partition Scheme: Minimal SPIFFS (1.9MB APP with OTA / 190KB SPIFFS)
- Port: Select the COM port for your CodeCell C3
- Board: ESP32C6 Dev Module
- USB CDC On Boot: Enabled // Required for Serial over USB
- CPU Frequency: 160 MHz
- Flash Size: 8 MB (64 Mb)
- Partition Scheme: 8M with SPIFFS (3 MB APP / 1.5 MB SPIFFS)
- Port: Select the COM port for your CodeCell C6
To initialize the CodeCell, use the myCodeCell.Init() function with one or more predefined macros.
Each macro corresponds to a specific sensing function.
- LIGHT // Light + proximity sensing
- MOTION_ACCELEROMETER // 3-axis acceleration
- MOTION_GYRO // 3-axis angular velocity
- MOTION_MAGNETOMETER // 3-axis magnetic field
- MOTION_LINEAR_ACC // Linear acceleration
- MOTION_GRAVITY // Gravity vector
- MOTION_ROTATION // Roll, pitch, yaw (with mag)
- MOTION_ROTATION_NO_MAG // Roll, pitch, yaw (no mag)
- MOTION_STEP_COUNTER // Step count
- MOTION_STATE // On table / Stationary / Stable / In motion
- MOTION_TAP_DETECTOR // Tap detection
- MOTION_ACTIVITY // Activity classification
- myCodeCell.Init(LIGHT); // Light only
- myCodeCell.Init(LIGHT + MOTION_ROTATION); // Light + orientation
- myCodeCell.Init(LIGHT + MOTION_ROTATION + MOTION_STATE);// Light + orientation + state
🧠 Combine multiple macros using the + operator to enable multiple sensors.
The myCodeCell.Run() function reads sensor data at a defined frequency and manages power and LED status.
if (myCodeCell.Run(10)) { // Executes code every 10 Hz (every 100 ms) }
myCodeCell.Run(10)→ returnstrueat 10 Hz (every 100 ms)- Read all enabled sensors at this rate
- Also handles the LED power indicator and power status
Low battery behavior:
- Below ~3.3 V → LED blinks red ×10 → enters sleep until USB is reconnected
- On USB → continues running loop(); LED shows charging/charged status
uint8_t state = myCodeCell.PowerStateRead();
Return values:
- 0 = Running from LiPo Battery
- 1 = Running from USB Power
- 2 = Power Initializing
- 3 = Battery Low
- 4 = Battery Fully Charged
- 5 = Battery Charging
int mv = myCodeCell.BatteryVoltageRead(); // e.g. 3720 (mV)
Returns the LiPo voltage in millivolts — great for thresholds or logging.
uint16_t lvl = myCodeCell.BatteryLevelRead();
Return values:
- 1–100 = Approximate battery percentage
- 101 = Charging (USB connected, charging)
- 102 = USB Power (bypassing battery)
Example:
if (lvl <= 100) { Serial.println("Battery: " + String(lvl) + "%"); }
else if (lvl == 101) { Serial.println("Charging..."); }
else if (lvl == 102) { Serial.println("USB Power"); }
After initialization, you can read the sensors using these functions:
- Light_ProximityRead() // Proximity
- Light_WhiteRead() // White light intensity
- Light_AmbientRead() // Ambient light
- Motion_TapRead() // Tap detection (1 = tap, 0 = none)
- Motion_StepCounterRead() // Step count
- Motion_StateRead() // On Table=1, Stationary=2, Stable=3, Motion=4
- Motion_ActivityRead() // Driving=1, Cycling=2, Walking=3/6, Still=4, Tilting=5, Running=7, Climbing=8
- Motion_AccelerometerRead(float &x, float &y, float &z) // Accelerometer (m/s²)
- Motion_GyroRead(float &x, float &y, float &z) // Gyroscope (°/s)
- Motion_MagnetometerRead(float &x, float &y, float &z) // Magnetometer (µT)
- Motion_GravityRead(float &x, float &y, float &z) // Gravity vector
- Motion_LinearAccRead(float &x, float &y, float &z) // Linear acceleration
- Motion_RotationRead(float &roll, float &pitch, float &yaw) // Rotation (degrees)
- Motion_RotationNoMagRead(float &roll, float &pitch, float &yaw) // Rotation w/o mag
- Motion_RotationVectorRead(float &vec_r, float &vec_i, float &vec_j, float &vec_k) // Quaternion
- uint16_t proximity = myCodeCell.Light_ProximityRead();
- myCodeCell.Motion_AccelerometerRead(x, y, z);
- myCodeCell.Motion_RotationRead(roll, pitch, yaw);
🧠 Tip: Use myCodeCell.PrintSensors(); to print all enabled sensor readings to the Serial Monitor.
- myCodeCell.pinWrite(uint8_t pin, bool value); // Digital write
- myCodeCell.pinRead(uint8_t pin); // Digital read
- myCodeCell.pinPWM(uint8_t pin, uint16_t freq, uint8_t dc); // PWM output (Hz, duty%)
- myCodeCell.pinADC(uint8_t pin); // Analog read
- myCodeCell.LED_SetBrightness(0); // Turn off CodeCell LED
- myCodeCell.LED_SetBrightness(10); // Full brightness
- myCodeCell.SleepTimer(uint16_t sleep_sec);
- myCodeCell.SleepProximityTrigger(uint16_t threshold); // C6 only
- myCodeCell.SleepLightTrigger(uint16_t threshold); // C6 only
- myCodeCell.SleepDarkTrigger(uint16_t threshold); // C6 only
- myCodeCell.SleepTapTrigger(); // C6 only
- Download the MicroLink library to connect the CodeCell with the companion smartphone app.
- Enables wireless sensor reading, joystick control, buttons and sliders.
This 'CodeCell' library contains various features, including device intialization, power managment, light sensning and motion sensing. The VCNL4040 light sensor code does not rely on any external libraries. But some of the BNO085 Motion-sensor functions were adapted from the SparkFun BNO08x Arduino Library and the official library provided by CEVA for the SH2 sensor hub.
The SparkFun BNO08x library, originally written by Nathan Seidle and adjusted by Pete Lewis at SparkFun Electronics, is released under the MIT License. Significant modifications were made to adapt it and integrate into the 'CodeCell' library.
Additionally, this project incorporates the official CEVA SH2 sensor hub library files, which is licensed under the Apache License 2.0.
CEVA’s notice is as follows:
This software is licensed from CEVA, Inc.
Copyright (c) CEVA, Inc. and its licensors. All rights reserved.
CEVA and the CEVA logo are trademarks of CEVA, Inc.
For more information, visit CEVA's website.