Inconsistency in making work moveit2 in Humble #1810
Comments
|
Have you tried switching the rmw to cyclonedds? There's a bug in fastdds not working well with callback groups see |
|
Wow, need to run more tests but the results are promising. |
|
Ok, that was part of the issue, the second part was related to the We have posted this question to ask how this can be set without hardcoding it using the new config load param system, but I'll consider this as answered not to extend more. If someone comes across this, just let you know that it was solved by two things:
Thanks again for the help @JafarAbdi |
|
Closing this, updates to the DDS situation will be posted to #1874 |
Description
We are getting this issue where sometimes when running moveit2 demo launch in a simulation , sometimes the execution fails and sometimes it doesn't. It changes each time we launch the launch files.
We are getting as working this:
[rviz2-4] [WARN] [1671098946.071992980] [moveit_ros.planning_scene_monitor.planning_scene_monitor]: Maybe failed to update robot state, time diff: 1671098872.983s
But its always there, when it fails the execution and when it doesn't, so not sure is siignificative.
We suspect that it might have an effect not setting the
use_sim_time. How can this be set with the new way in humble of loading config parameters? In which file we have to put it?Your environment
Steps to reproduce
Launch a simulation of a robot arm an then the demo.launch.py form moveit.
Source code: https://bitbucket.org/theconstructcore/panda_simulation/src/master/
ROSject PLug and play with all the code and instructions to launch it in notebook: https://app.theconstructsim.com/l/537b5a08/
Launch the following:
Expected behaviour
It should be able to plan an execute every time you launch the same launches.
Actual behaviour
It "randomly " fails the execute fase.
Backtrace or Console output
When it doesn't work, no error appears just no moving arrows appear in RVIZ
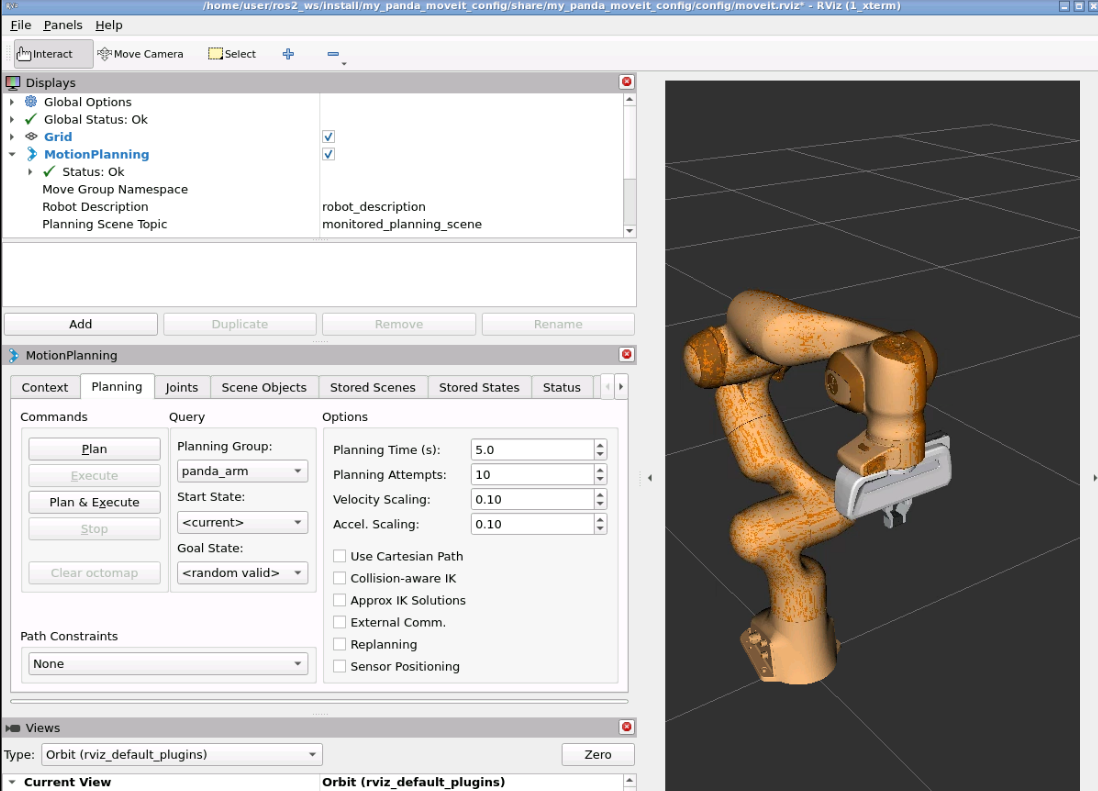
When it the arrows appear:
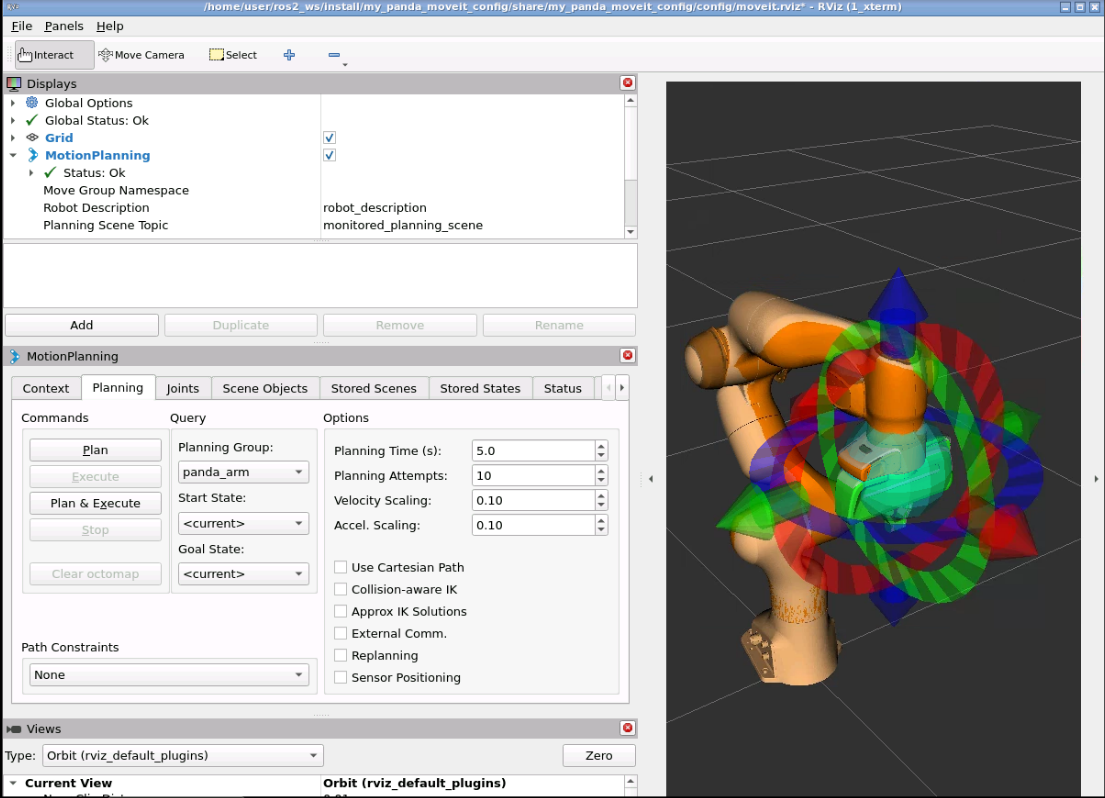
I made it appear the arrows by executing:
Don't know if this makes any sense?
I this resetting some parameters?
Does anyone know what could this be?
Because even when the arrows appear, it fails to execute, giving the error:
And when we try to do a dump of the parameters it gives this error:
ros2 param dump /move_groupTraceback (most recent call last):
File "/opt/ros/humble/local/lib/python3.10/dist-packages/rcl_interfaces/msg/_parameter_value.py", line 225, in double_value
assert value >= -1.7976931348623157e+308 and value <= 1.7976931348623157e+308,
AssertionError: The 'double_value' field must be a double in [-1.7976931348623157e+308, 1.7976931348623157e+308]
The text was updated successfully, but these errors were encountered: