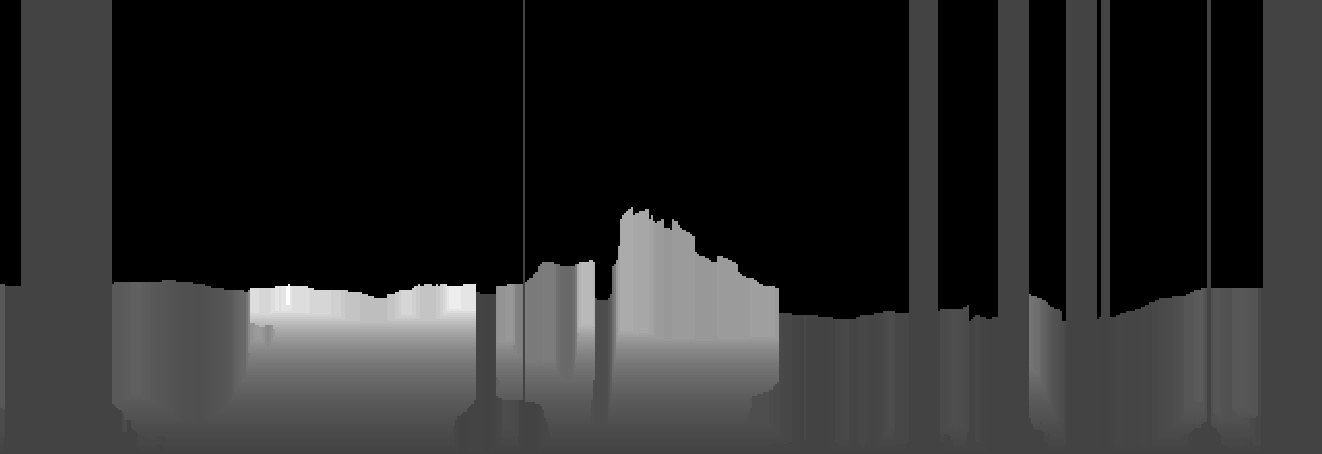
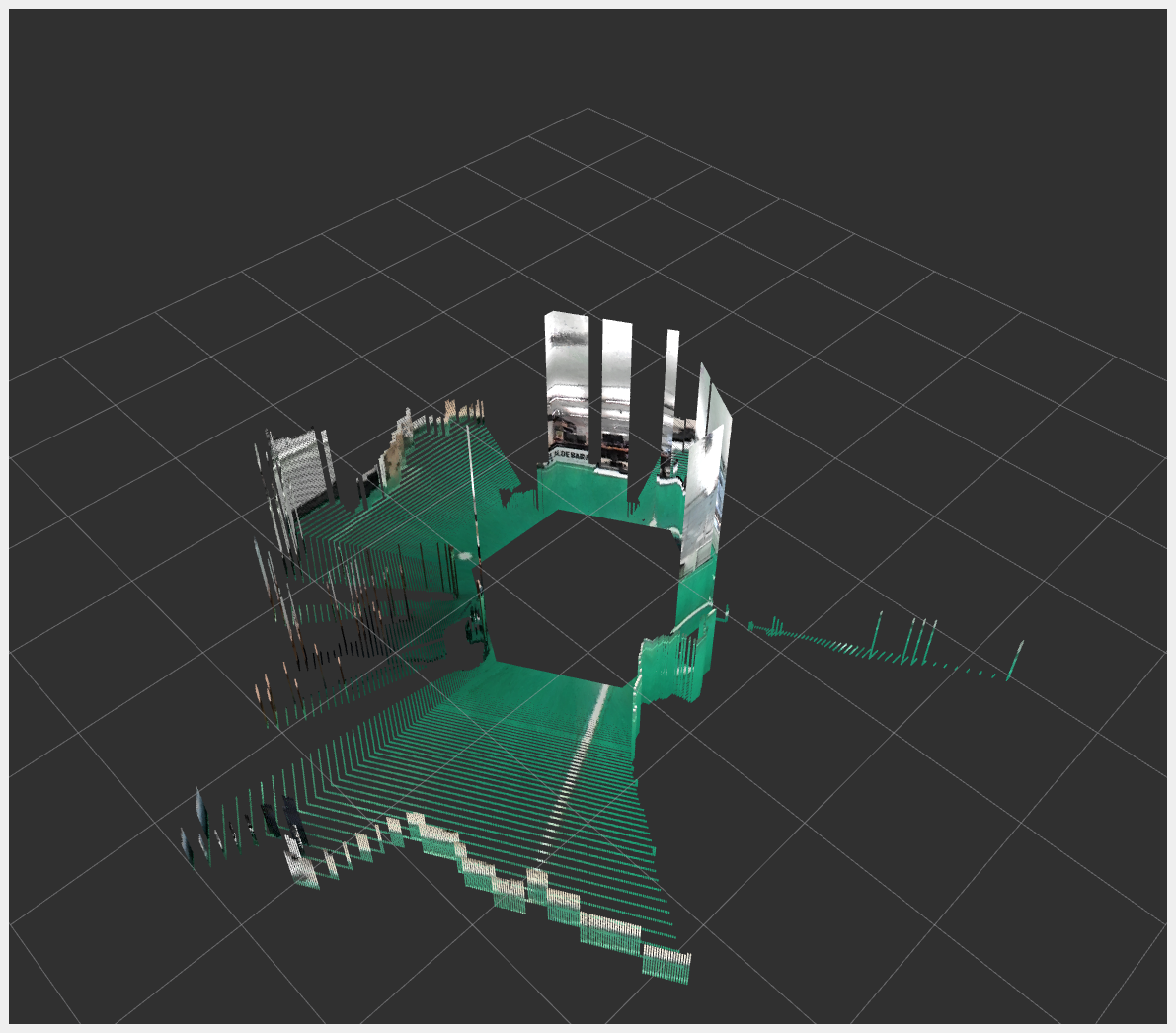
This unoffical package creates a ros2 node which publishes the panoramic images (both color and depth) and a point cloud from the DreamVU PAL camera.
An official ros1-package is available at the DreamVU software page, which is a package based on the Catkin build system.
This package here is based on the Colcon build system, which allows to build the package for the combination of Ubuntu 20.04 (Focal Fossa) with ROS2 Foxy Fitxroy.
This package lets you use the PAL camera with ROS2. It will provide access to the following data:
- Left and right unrectified images
- Depth data
- Colored 3D point-cloud


- The published messages require a chain of coordinate transformations from the sensor to the robot base to the map to allow rviz2 to visualize the images and point cloud.
- The software is currently tested on three computers, more tests are on the way.
- The node works with SDK v1.2 for Ubuntu 18.04 (18 April 2021), while you expect for ros-foxy that the version for 20.04 (15 May 2021) should be the best choice. Unfortunately, the 20.04 version doesn't contain the necessary python-libraries. This is still the case for the version released on github (last updated 5 January 2022).
- The package is tested with the zip version of SDK v1.2 for Ubuntu 18.04. It should still be tested with github version of this SDK.
- The sensitivity for ROS and Ubuntu version originates from the dependence on the python3 version. Ubuntu 18.04 had as default python3.6, Ubuntu 20.04 had as default python3.8, Ubuntu 22.04 has as default python3.10. Because Dreamvu drivers perform their warping with a network that has python3.6 bindings, also python3.6 bindings are needed for the ros2 bindings. Yet, the virtual python3.6 environment Dreamvu provides gives conflicts for the latest ROS2 releases.
- Tried to update to Ubuntu 22.04 and ROS2 Humble, but this fails on rclpy bindings.
The installation depends on your Long Term Support version of Ubuntu. Installation instructions are available of 20.04 LTS.
Next to the default packages, also install
sudo apt install usbutils
sudo apt install v4l-utils
sudo add-apt-repository ppa:deadsnakes/ppa
sudo apt update
sudo apt install python3.6-dev
sudo apt install python3-pipIf the ros repository is not already on your package list, add it
sudo apt update && sudo apt install curl gnupg2 lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update- Ubuntu 20.04 (Focal Fossa): ROS2 Foxy Fitzroy
This ros-node is using the following ros-packages:
$ sudo apt install ros-foxy-ros-base
$ sudo apt install ros-foxy-rviz2
$ sudo apt install ros-foxy-image-transport
$ sudo apt install ros-foxy-camera-info-manager
$ sudo apt install ros-foxy-image-view
$ sudo apt install ros-foxy-v4l2-cameraThe instructions hereafter are again the same for both combinations (22.04: Jammy / Humble) and (20.04: Focal / Foxy).
$ sudo apt install python3-rosdep2
$ sudo apt install python3-colcon-common-extensions- PAL USB SDK - Tested with SDK v1.2 for Ubuntu 18.04 (24 April 2021)
$ unzip PAL-Firmware-v1.2-Intel-CPU.zip
$ cd PAL-Firmware-v1.2-Intel-CPU/installations/
$ cd camera_data
$ source setup_python_lib.sh
$ cd ..
$ sudo ./PAL_udev.sh
REBOOTAfter unzipping the SDK, remember this directory location as PAK_SDK_DIR for the script that has to be executed during the Build
- Calibration package for the DreamVU camera with your serial number (contact DreamVU support for this package, this package is especially made for your camera).
$ unzip PUM*.zip
$ cd PUM*/
$ source setup.sh
$ cd ..Note that not the complete installation procedure of the PAL USB SDK have to be followed, the three steps described above are enough for this ros2 package.
To install the ros2 pal_camera_node, clone the package from github and build it:
$ cd ~/ros2_ws/src/ #use your current ros2 workspace folder
$ git clone https://github.com/physar/ros2_pal_camera_node.git
$ cd ./ros2_pal_camera_node/pal_camera/
$ source ./etc/dreamvu/logic_link.sh PAL_SDK_DIR
$ cd ../../..
$ sudo apt-get update
$ /opt/ros/$ROS_DISTRO/setup.bash
$ rosdep update
$ rosdep install --from-paths src --ignore-src -r -y
$ colcon build --packages-select pal_camera --symlink-install --cmake-args=-DCMAKE_BUILD_TYPE=Release
$ source $(pwd)/install/local_setup.bashIf you want to install this package permanently ot your shell,
$ echo source $(pwd)/install/local_setup.bash >> ~/.bashrc
$ source ~/.bashrcTo start the ros2 pal_camera_node, open a terminal and start it with the command.
$ source /opt/ros/foxy/setup.bash
$ source $~/ros2_ws/install/local_setup.bash
$ ros2 launch pal_camera pal_camera.launch.pyor alternatively, in ROS1-style
$ ros2 run pal_camera captureThe difference between the launch and the run, is that the launch loads its parameters from config/pal_usb.yaml, which allows an easy way to change the name (if you have two PAL cameras mounted on your robot) or the mounting position.
The run can only be used with the default settings.
The easiest way to inspect the published data is the following command:
$ ros2 topic list | grep dreamvuThis should give the following result:
/dreamvu/pal/get/camera_info
/dreamvu/pal/get/depth
/dreamvu/pal/get/left
/dreamvu/pal/get/point_cloud
/dreamvu/pal/get/rightThe next way to see the panoramic images is with image_view:
$ ros2 run image_view image_view --ros-args --remap image:=/dreamvu/pal/get/rightThe complete set of published data can be seen by the following command:
ros2 run rviz2 rviz2Add in this view an Image (for the topics /dreamvu/pal/get/left, /dreamvu/pal/get/right, /dreamvu/pal/get/depth or a PointCloud2 (for topic /dreamvu/pal/get/point_cloud).
In later versions of this package a launch script with for rviz2 will be provided.
-
If your PAL camera is not connected to a USB 3.1, it is not visible with lsusb | grep See3CAM. Use in that case a faster USB port.
-
If you are using the 20.04 version of the USB, you will encounter an PAL_MIDAS::Init() assertion. Use the 18.04 version of the software, by running the logic_link script again.
-
If you are using the 18.04 version of the Dreamvu drivers, but still get the PAL_MIDAS:Init() assertion, you may have forgotten to do
source /opt/ros/foxy/setup.bashfor this terminal. -
rviz2 is dropping messages. This means that your robot is not publishing any coordinate transformations from the map to the base_link. The camera images are published from the coordinate system 'pal_camera_center'.
-
During initialization there are many onnxruntime warnings on CleanUnusedInitializers. These is are warnings of the dreamvu driver itself, which should be ignored according to the SDK manual. Hopefully they are gone for PAL SDK versions above v1.2.