The goal of this project is to design a navigation system of RB-1 robot that works in a warehouse. Tghe project is divided into several tasks including,
- create a map of the warehouse
- localize RB-1 in the map
- launch Nav2 system that allows to send navigation goals to the robot
- configure all required navigation parameters
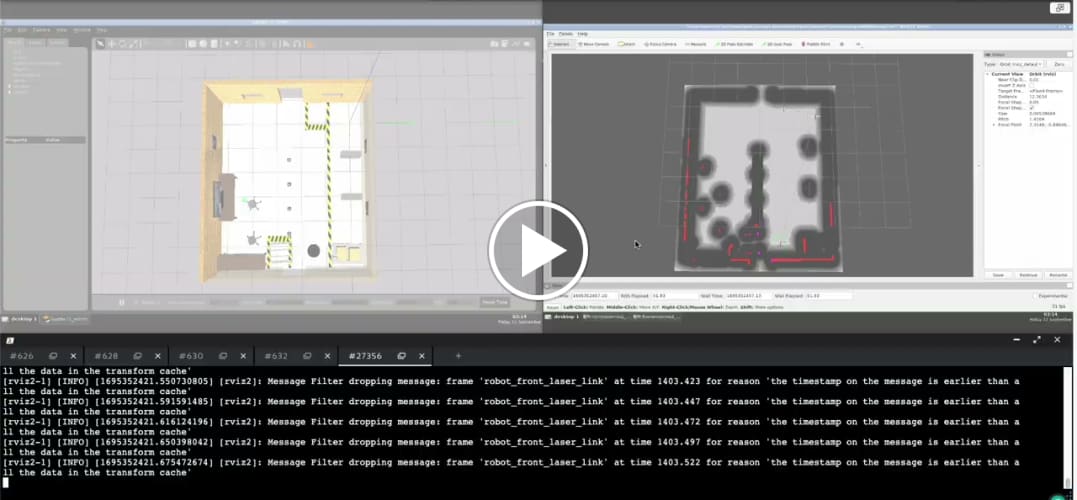
The warehouse map is generated by a cartographer and occupancy_grid nodes
ros2 launch map_server map_server.launch.py map_file:=warehouse_map_sim.yaml

After that use map_server node to feed the map in and use amcl node provided by ROS to localize the robot in the map
ros2 launch localization_server localization.launch.py map_file:=warehouse_map_sim.yaml
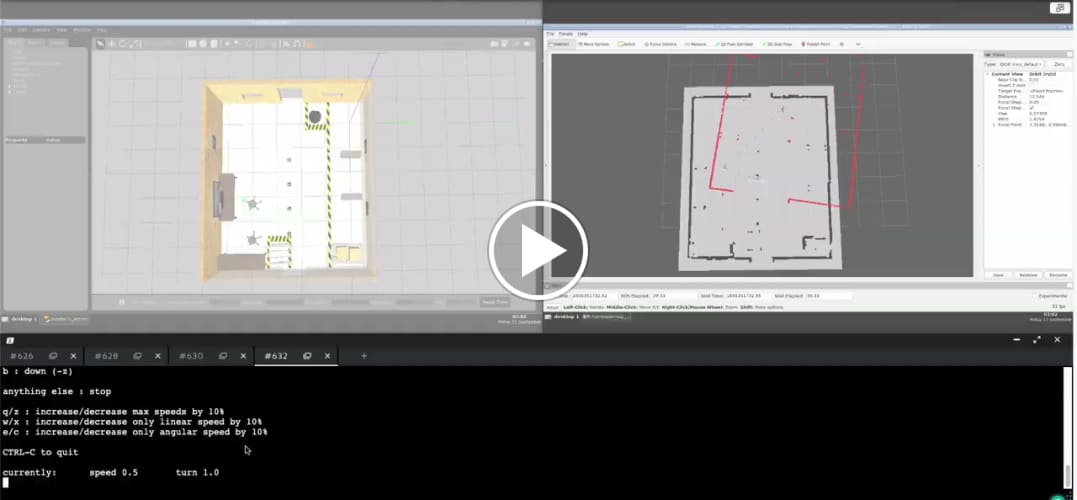
Move the robot to see the particle clouds are converging to the robot location.
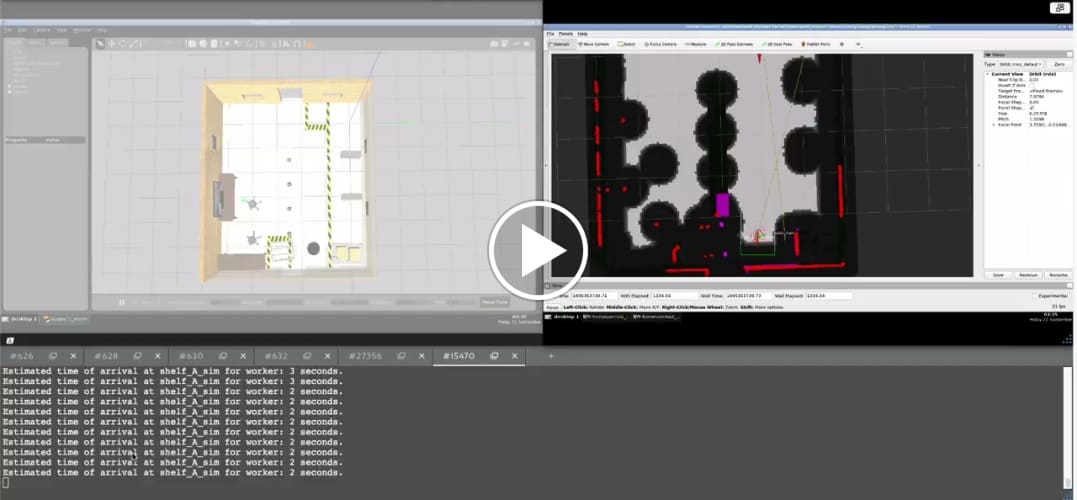
ros2 launch path_planner_server pathplanner.launch.py
Manually send the navigation goals to the robot in Rviz.
Send goals programmatically through Nav2 API in Python. Command the robot to move to shelf's front,lift it and move to unload position.
{kind=link}
{kind=link}