Software ~ Advanced ~ Bidirectional telemetry
- Set
TELEMETRY_UPLINK=mavlink, TELEMETRY_TRANSMISSION=wbc, TELEMETRY_UPLINK=mavlink, RC=mavlinkin wifibroadcast-1.txt - Connect Tower App, QGroundControl or Missionplanner etc. via USB-Tethering or Hotspot
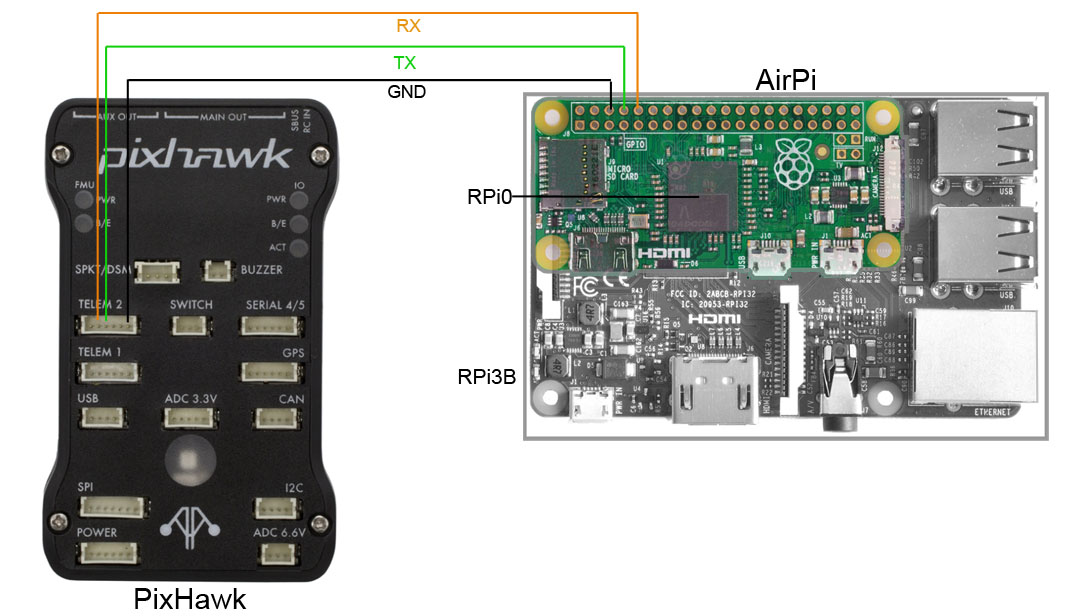
- Connect the serial port RX pin of your flight controler to the serial port TX pin on the AirPi and the serial port TX pin of your flight controller to the serial port RX pin on the AirPi. The Pi uses 3.3V logic level on the serial ports, make sure your flight control also uses 3.3V. Flight controllers which need 5V logic may not be able to detect the 3.3V signal level (See https://pinout.xyz/ for Raspberry pinout).
Wiring diagram for bi-directional telemetry: on pixhawk side.