Gazebo上でシミュレートできるRaspberry Pi MouseのROSパッケージ一式です。
詳細なセットアップ方法はWikiにまとめています。
| main develop (master) |
Noetic + Ubuntu Focal (noetic-devel) |
|---|---|
以下のブランチのメンテナンスは終了しています。
- rpim_book_version
- indigo-devel
- kinetic-devel
- melodic-devel
以下の環境を前提として動作確認しています。
- Ubuntu
- Ubuntu Focal Fossa 20.04.*
- ROS
- ROS Noetic Ninjemys
- Gazebo
- Gazebo 11.x
- ROS Package
- ros-noetic-desktop-full
このROSパッケージをダウンロードします。
cd ~/catkin_ws/src
git clone https://github.com/rt-net/raspimouse_sim.git
依存しているROSパッケージをインストールします。
cd ~/catkin_ws/src
git clone https://github.com/ryuichiueda/raspimouse_ros_2.git
git clone https://github.com/rt-net/raspimouse_description.git
rosdep install -r -y -i --from-paths raspimouse*
catkin_makeを使用してパッケージをビルドします。
cd ~/catkin_ws && catkin_make
source ~/catkin_ws/devel/setup.bash
Gazeboで使用するハードウェアモデルデータをダウンロードします。
rosrun raspimouse_gazebo download_gazebo_models.sh
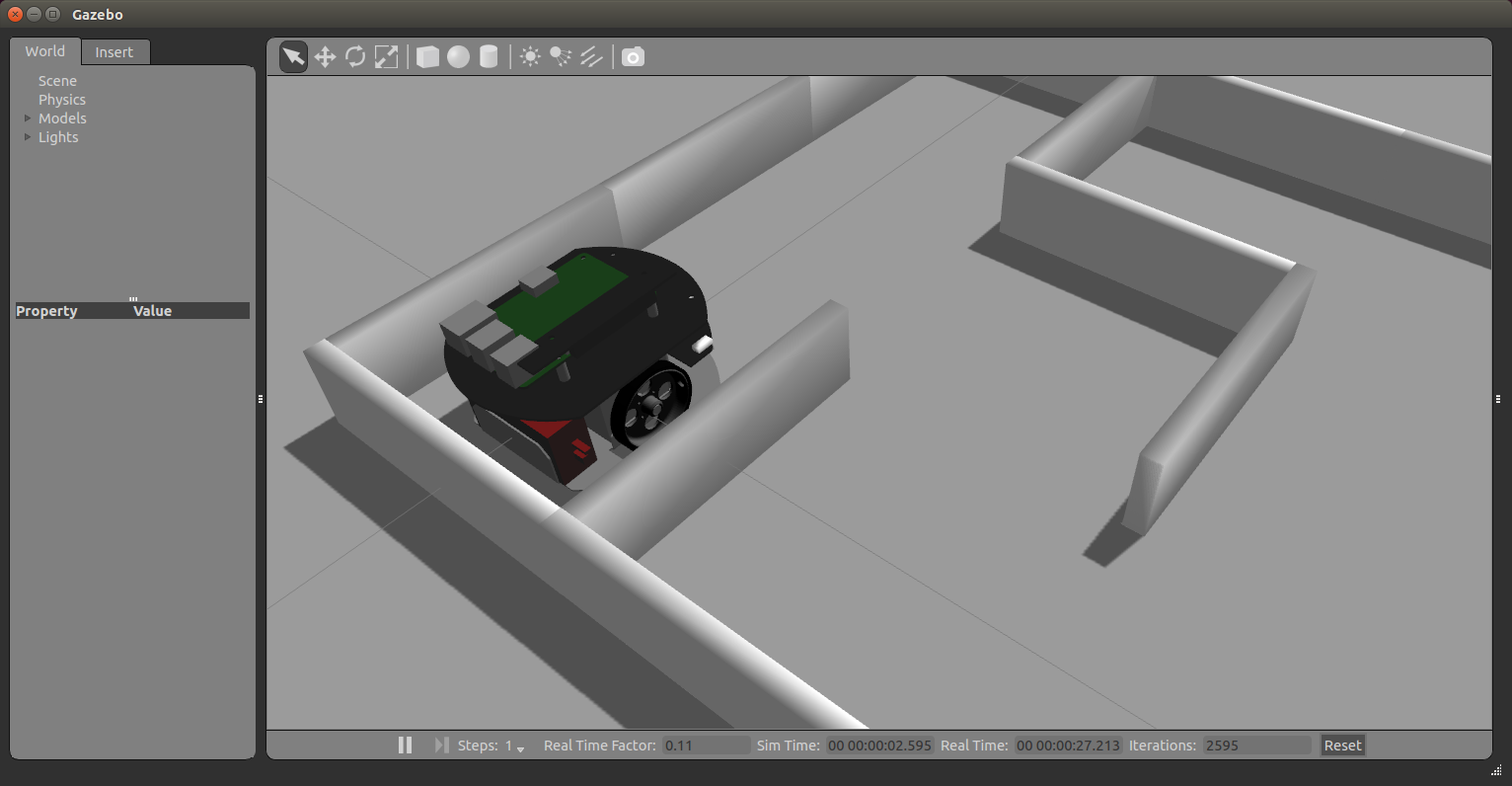
シミュレータのインストール後、次のコマンドを入力して起動してください。
roslaunch raspimouse_gazebo raspimouse_with_samplemaze.launch
詳細はこのページをお読みください。
roslaunch raspimouse_gazebo raspimouse_with_samplemaze.launch
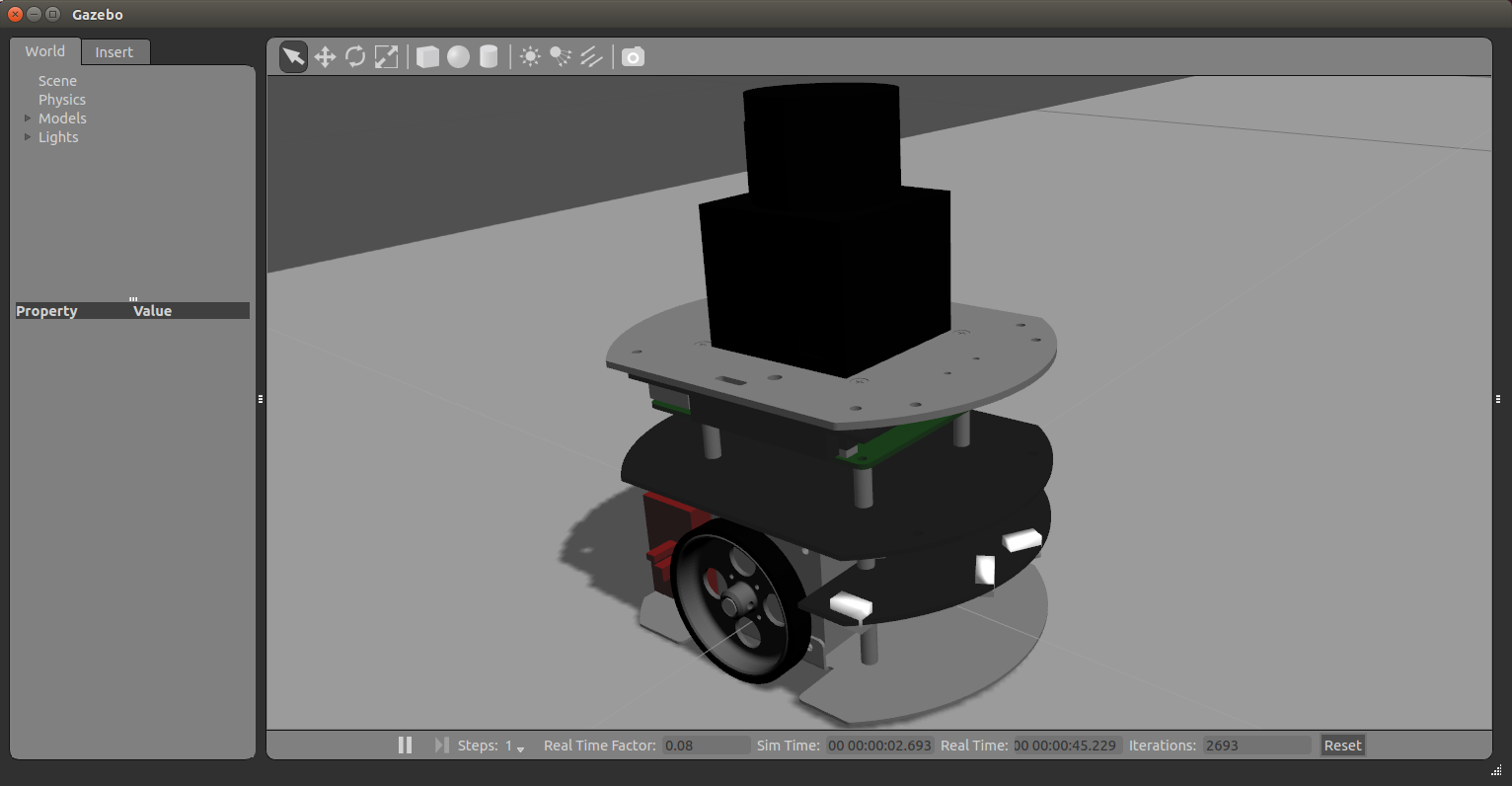
roslaunch raspimouse_gazebo raspimouse_with_gasstand.launch
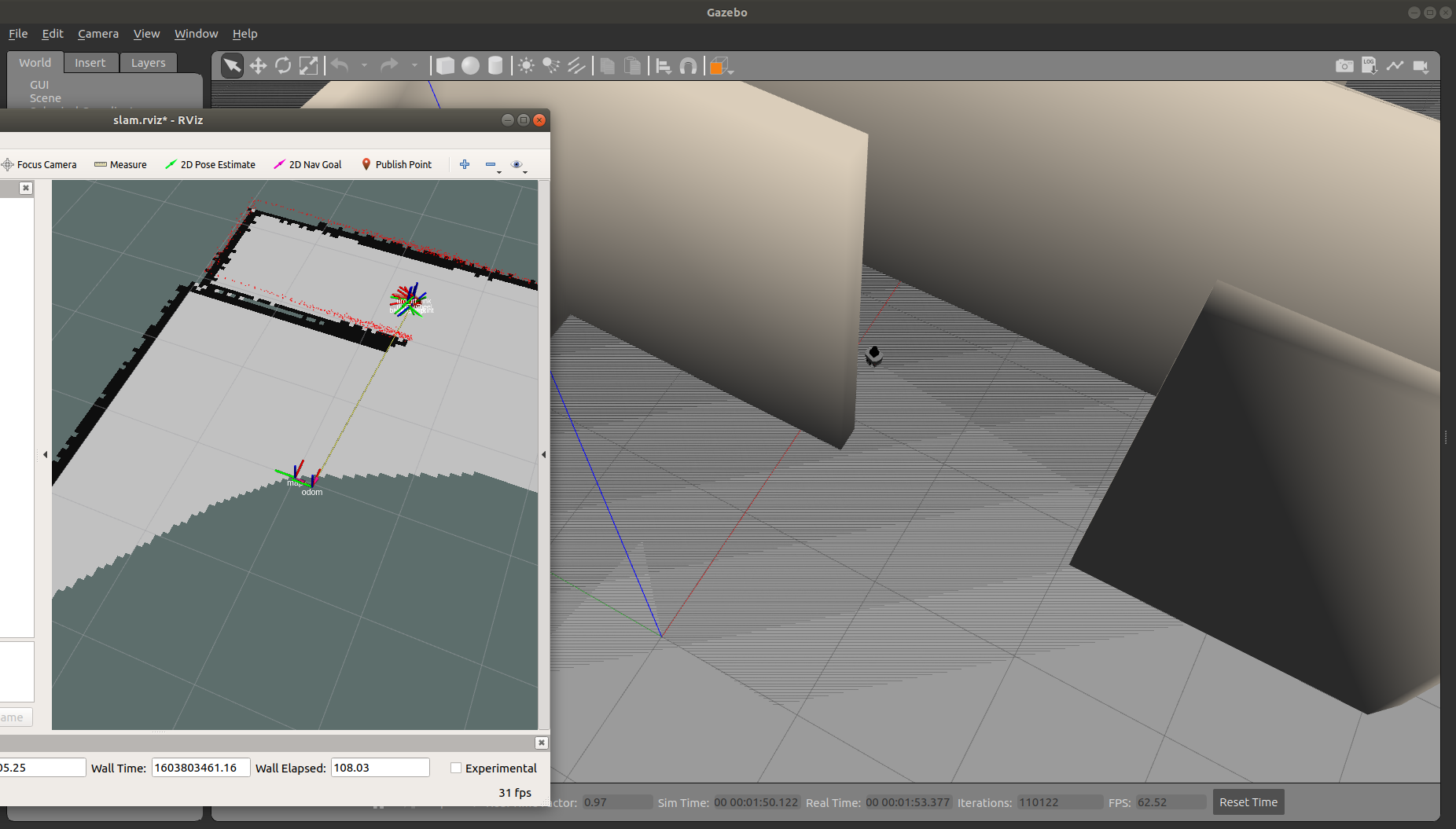
# 1つ目の端末で
roslaunch raspimouse_gazebo raspimouse_with_willowgarage.launch
# 2つ目の端末で
roslaunch raspimouse_ros_examples slam_gmapping.launch
# 3つ目の端末で
roslaunch raspimouse_ros_examples teleop.launch key:=true mouse:=false
※raspimouse_ros_examplesを使う際にはrt-net/raspimouse_ros_examplesのインストールが必要です。
以下のコマンドでインストールができます。
cd ~/catkin_ws/src
git clone https://github.com/rt-net/raspimouse_ros_examples.git
rosdep install -r -y -i --from-paths raspimouse*
cd ~/catkin_ws && catkin_make
source ~/catkin_ws/devel/setup.bash
このリポジトリはMITライセンスに基づいて公開されています。
MITライセンスについてはLICENSEを確認してください。
※このソフトウェアは基本的にオープンソースソフトウェアとして「AS IS」(現状有姿のまま)で提供しています。本ソフトウェアに関する無償サポートはありません。
バグの修正や誤字脱字の修正に関するリクエストは常に受け付けていますが、それ以外の機能追加等のリクエストについては社内のガイドラインを優先します。
以下のリポジトリのファイルをベースに開発されています。
- CIR-KIT/fourth_robot_pkg
- author
- RyodoTanaka
- maintainer
- RyodoTanaka
- BSD (BSD 3-Clause License)
- 詳細は package.xml を参照してください。
- author
- yujinrobot/kobuki
- authors
- Daniel Stonier
- Younghun Ju
- Jorge Santos Simon
- Marcus Liebhardt
- maintainer
- Daniel Stonier
- BSD (BSD 3-Clause License)
- 詳細は package.xml を参照してください。
- authors