Free (drivable) space identification for self-driving cars using stereo vision.
To find the obstacle-free space around the self-driving vehicle using images recorded by a stereo camera. The images in the Kitti Dataset are used for demonstrating the functionality of the utility.
Check out the following video demonstrating the functionality of the utility. Click the picture to play video.
{kind=link}
{kind=link}
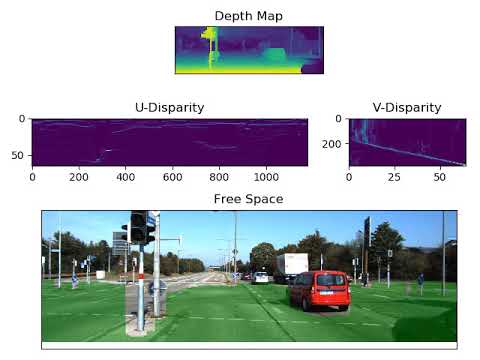
- The left and right images recorded by the camera are processed by the SGBM (Semi-Global Matching) algorithm and smoothened out using a WLS (weighted least square) filter, all of which are available in OpenCV.
- The depth map thus obtained is used to create u-disparity and v-disparity maps.
- Free-space segmentation is done in u-disparity map and a boundary is identified. The boundary (location in each image column)is modelled as a HMM with custom transition and emission probabilities and the Viterbi algorithm is used to identify the boundary.
- V-disparity map is used to identify the road plane, which is then used to map the boundary from the u-disparity map to the actual image.
- The algorithm separately processes each frame, which are finally clubbed together into a video using ffmpeg.
- This utility is suitable only for flat roads.
- Currently the latency is very high (around 1s for processing a frame) with an i7-7500U.
- Has low accuracy with quite a few false positives - failed to identify (parts of) obstacles that are very close.
- Noisy - spatial noise can be (further) reduced by adjusting the transition probabilities of the HMM model and the temporal noise can be reduced by incorporating a Kalman filter (not-implemented) over successive frames.
- numpy
- matplotlib
- opencv
- scipy
- tqdm
- scikit-learn
- hmmlearn
- unzip
- ffmpeg
- Checkout docstrings for detailed usage instructions
- Make sure that the listed dependencies are installed.
- Make sure that the executable flag is set for
setup.py. Run it to download and extract the necessary video frames from the KITTI raw (synced+rectified) dataset. - Run
./stereo.py left.png right.pngto check the stereo utility using the supplied sample images. It can also be used as a python module and the instructions for using the corresponding function can be found in the source code. - Run
./freespace.py left.png right.pngto check the free-space mapping utility using the supplied sample images. It can also be used as a python module and the instructions for using the corresponding function can be found in the source code. - Run
./render.pyto create the output videooutput.mkvwith all the free-space estimated in all frames of video downloaded from the Kitti Dataset repository. - This
output.mkvdemonstrates the free-space estimating utility