Simulate a simple Ackermann steering vehicle in Gazebo using ros_control
the ackermann_steering_controller and steer_bot_hardware_gazebo.
# Create a workspace folder
mkdir -p <catkin_ws>/src
# Clone the repo
cd <catkin_ws>/src
git clone https://github.com/srmainwaring/steer_bot
# Checkout a version of `steer_drive_ros` patched for ROS Melodic
git clone https://github.com/tsedl/steer_drive_ros.git
cd steer_drive_ros
git checkout melodic-devel
# Check dependencies
rosdep check --from-paths src --ignore-src --rosdistro melodic
# Install dependencies
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
# Build
cd <catkin_ws>/src
catkin buildStart the Gazebo simulation:
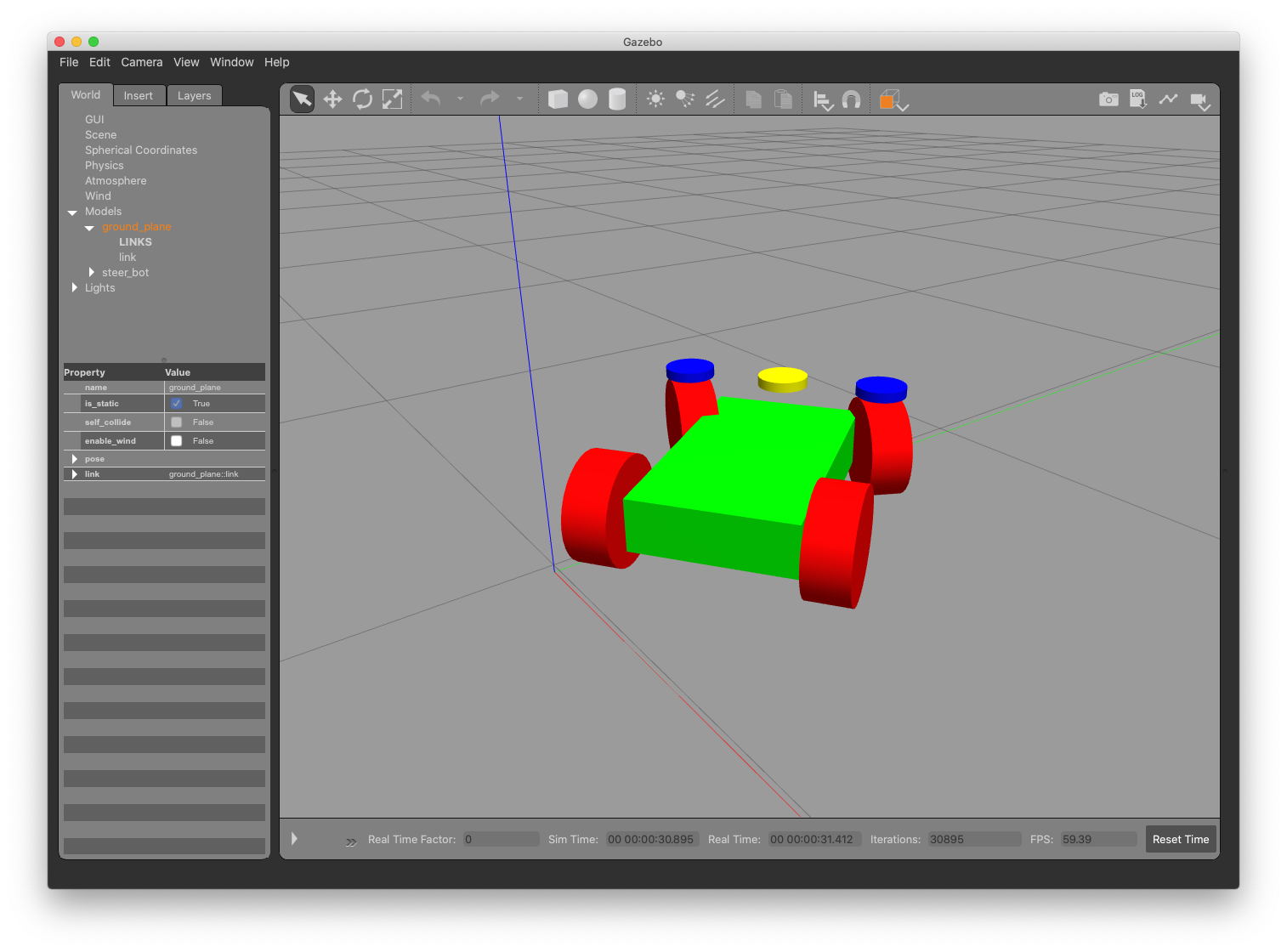
roslaunch steer_bot_gazebo steer_bot_sim.launchStart rviz:
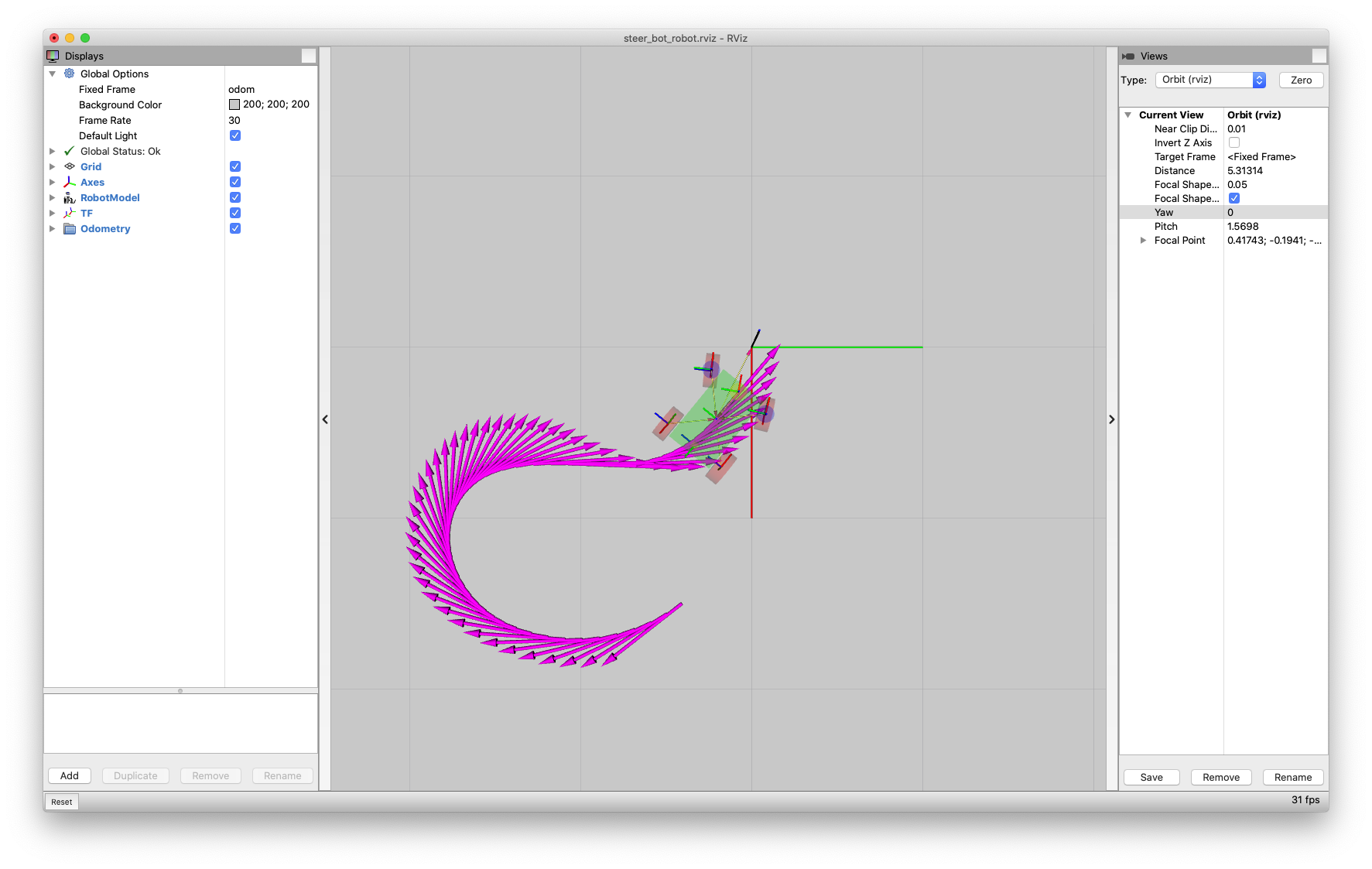
roslaunch steer_bot_viz view_steer_bot_robot.launchIf all is working well you should see the robot in Gazebo and be able to
command it using rqt_robot_steering:
The robot model and odometry can be monitored in rviz:
| Melodic | |
|---|---|
| steer_bot |  |
| Melodic | |
|---|---|
| steer_bot |  |
This software is licensed under the BSD-3-Clause license found in the LICENSE file in the root directory of this source tree.