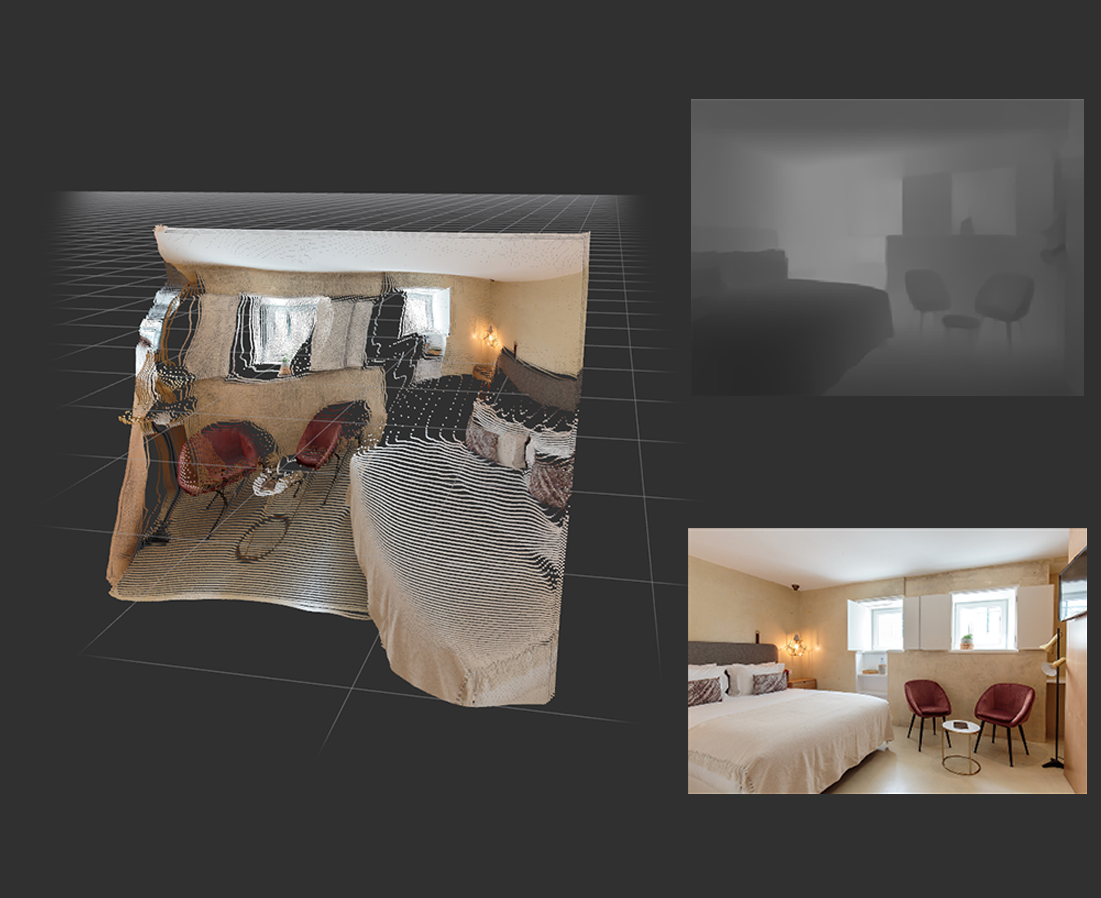
- ROS node used to estimated depth from monocular RGB data.
- Should be used with Python 2.X and ROS
- The original code is at the repository Dense Depth Original Code
- High Quality Monocular Depth Estimation via Transfer Learning by Ibraheem Alhashim and Peter Wonka

- Topics subscribed by the ROS node
- /image/camera_raw - Input image from camera (can be changed on the parameter topic_color)
- Topics published by the ROS node, containing depth and point cloud data generated.
- /image/depth - Image message containing the depth image estimated (can be changed on the parameter topic_depth).
- /pointcloud - Pointcloud2 message containing a estimated point cloud (can be changed on the parameter topic_pointcloud).
- Parameters that can be configurated
- frame_id - TF Frame id to be published in the output messages.
- debug - If set true a window with the output result if displayed.
- min_depth, max_depth - Min and max depth values considered for scaling.
- batch_size - Batch size used when predicting the depth image using the model provided.
- model_file - Keras model file used, relative to the monodepth package.
- Install Python 2 and ROS dependencies
apt-get install python python-pip curl
pip install rosdep rospkg rosinstall_generator rosinstall wstool vcstools catkin_tools catkin_pkg- Install project dependencies
pip install tensorflow keras pillow matplotlib scikit-learn scikit-image opencv-python pydot GraphViz tk- Clone the project into your ROS workspace and download pretrained models
git clone https://github.com/tentone/monodepth.git
cd monodepth/models
curl –o nyu.h5 https://s3-eu-west-1.amazonaws.com/densedepth/nyu.h5- Example ROS launch entry provided bellow, for easier integration into your already existing ROS launch pipeline.
<node pkg="monodepth" type="monodepth.py" name="monodepth" output="screen" respawn="true">
<param name="topic_color" value="/camera/image_raw"/>
<param name="topic_depth" value="/camera/depth"/>
</node>- Pre-trained keras models can be downloaded and placed in the /models folder from the following links:
- NYU Depth V2 (50K)
- The NYU-Depth V2 data set is comprised of video sequences from a variety of indoor scenes as recorded by both the RGB and Depth cameras from the Microsoft Kinect.
- Download dataset (4.1 GB)
- KITTI Dataset (80K)
- Datasets captured by driving around the mid-size city of Karlsruhe, in rural areas and on highways. Up to 15 cars and 30 pedestrians are visible per image.