This is the official implementation of RandLA-Net (CVPR2020, Oral presentation), a simple and efficient neural architecture for semantic segmentation of large-scale 3D point clouds. For technical details, please refer to:
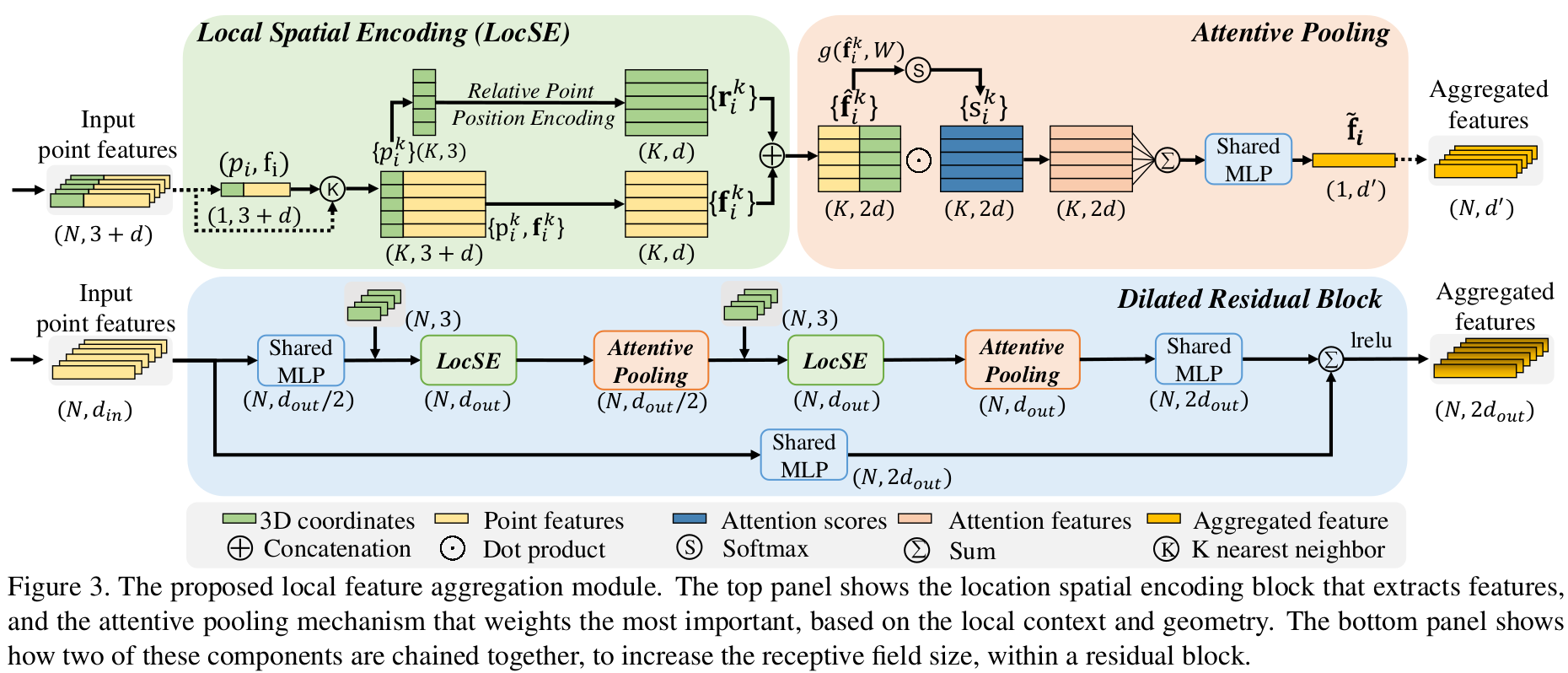
RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds
Qingyong Hu, Bo Yang*, Linhai Xie, Stefano Rosa, Yulan Guo, Zhihua Wang, Niki Trigoni, Andrew Markham.
[Paper] [Video] [Blog] [Project page]
This code has been tested with Python 3.5, Tensorflow 1.11, CUDA 9.0 and cuDNN 7.4.1 on Ubuntu 16.04.
- Clone the repository
git clone --depth=1 https://github.com/QingyongHu/RandLA-Net && cd RandLA-Net
- Setup python environment
conda create -n randlanet python=3.5
source activate randlanet
pip install -r helper_requirements.txt
sh compile_op.sh
Update 03/21/2020, pre-trained models and results are available now.
You can download the pre-trained models and results here.
Note that, please specify the model path in the main function (e.g., main_S3DIS.py) if you want to use the pre-trained model and have a quick try of our RandLA-Net.
S3DIS dataset can be found
here.
Download the files named "Stanford3dDataset_v1.2_Aligned_Version.zip". Uncompress the folder and move it to
/data/S3DIS.
- Preparing the dataset:
python utils/data_prepare_s3dis.py
- Start 6-fold cross validation:
sh jobs_6_fold_cv_s3dis.sh
- Move all the generated results (*.ply) in
/testfolder to/data/S3DIS/results, calculate the final mean IoU results:
python utils/6_fold_cv.py
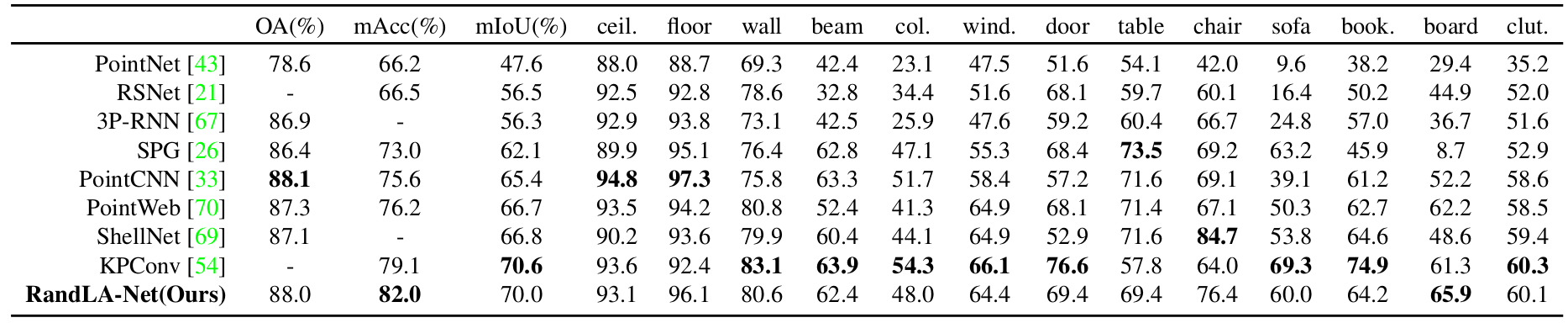
Quantitative results of different approaches on S3DIS dataset (6-fold cross-validation):
Qualitative results of our RandLA-Net:
 |
 |
|---|
7zip is required to uncompress the raw data in this dataset, to install p7zip:
sudo apt-get install p7zip-full
- Download and extract the dataset. First, please specify the path of the dataset by changing the
BASE_DIRin "download_semantic3d.sh"
sh utils/download_semantic3d.sh
- Preparing the dataset:
python utils/data_prepare_semantic3d.py
- Start training:
python main_Semantic3D.py --mode train --gpu 0
- Evaluation:
python main_Semantic3D.py --mode test --gpu 0
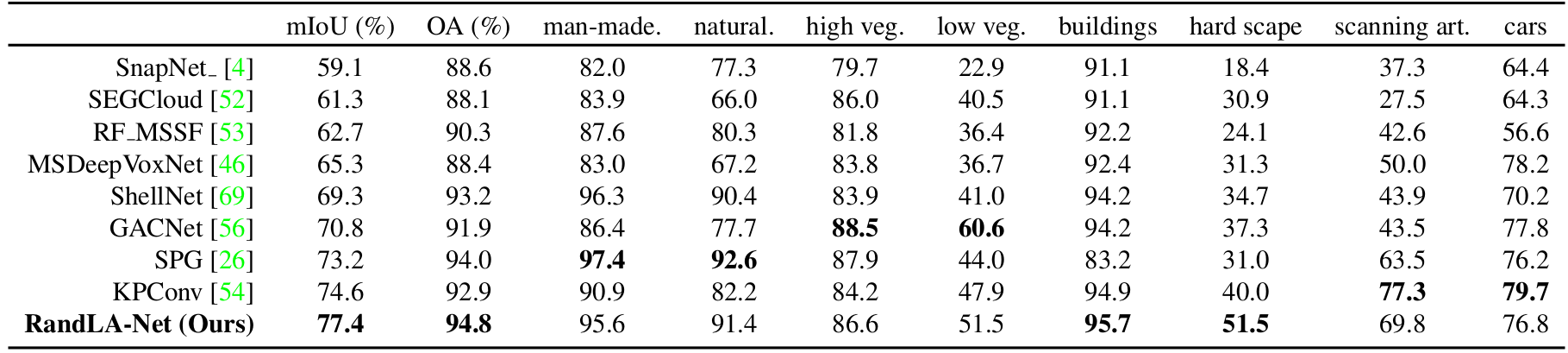
Quantitative results of different approaches on Semantic3D (reduced-8):
Qualitative results of our RandLA-Net:
 |
 |
|---|---|
 |
 |
Note:
- Preferably with more than 64G RAM to process this dataset due to the large volume of point cloud
SemanticKITTI dataset can be found here. Download the files
related to semantic segmentation and extract everything into the same folder. Uncompress the folder and move it to
/data/semantic_kitti/dataset.
- Preparing the dataset:
python utils/data_prepare_semantickitti.py
- Start training:
python main_SemanticKITTI.py --mode train --gpu 0
- Evaluation:
sh jobs_test_semantickitti.sh
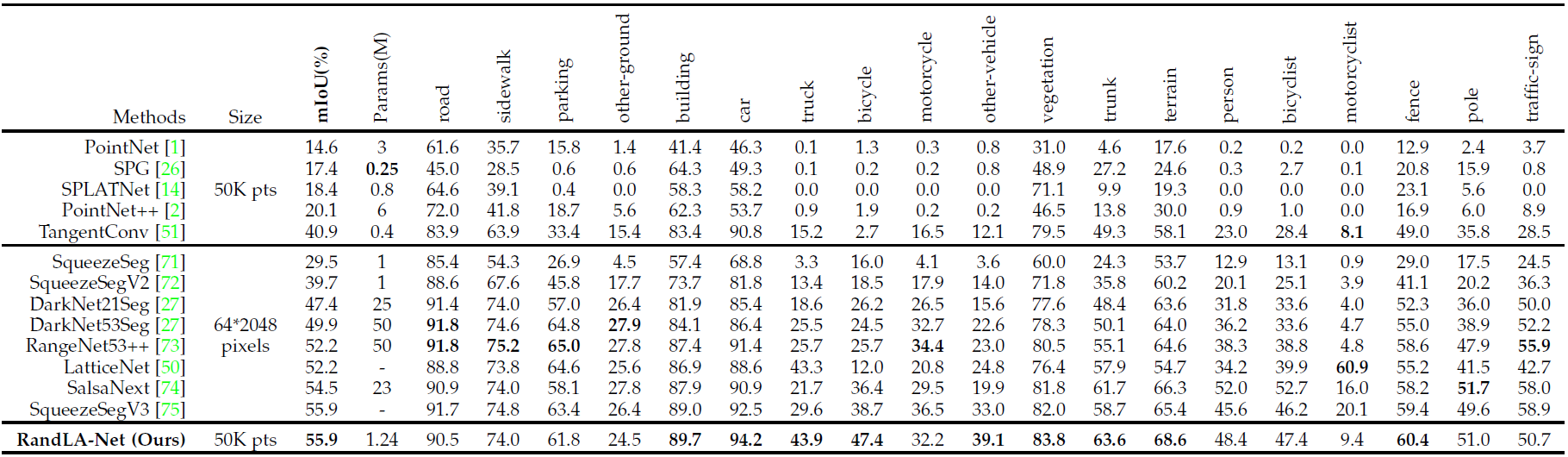
Quantitative results of different approaches on SemanticKITTI dataset:
Qualitative results of our RandLA-Net:

If you find our work useful in your research, please consider citing:
@article{hu2019randla,
title={RandLA-Net: Efficient Semantic Segmentation of Large-Scale Point Clouds},
author={Hu, Qingyong and Yang, Bo and Xie, Linhai and Rosa, Stefano and Guo, Yulan and Wang, Zhihua and Trigoni, Niki and Markham, Andrew},
journal={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
year={2020}
}
@article{hu2021learning,
title={Learning Semantic Segmentation of Large-Scale Point Clouds with Random Sampling},
author={Hu, Qingyong and Yang, Bo and Xie, Linhai and Rosa, Stefano and Guo, Yulan and Wang, Zhihua and Trigoni, Niki and Markham, Andrew},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2021},
publisher={IEEE}
}
- Part of our code refers to nanoflann library and the the recent work KPConv.
- We use blender to make the video demo.
Licensed under the CC BY-NC-SA 4.0 license, see LICENSE.
- 21/03/2020: Updating all experimental results
- 21/03/2020: Adding pretrained models and results
- 02/03/2020: Code available!
- 15/11/2019: Initial release!
- SoTA-Point-Cloud: Deep Learning for 3D Point Clouds: A Survey
- SensatUrban: Learning Semantics from Urban-Scale Photogrammetric Point Clouds
- 3D-BoNet: Learning Object Bounding Boxes for 3D Instance Segmentation on Point Clouds
- SpinNet: Learning a General Surface Descriptor for 3D Point Cloud Registration
- SQN: Weakly-Supervised Semantic Segmentation of Large-Scale 3D Point Clouds with 1000x Fewer Labels




