Support for multiple worlds #18
Comments
|
Original comment by Michael Grey (Bitbucket: mxgrey, GitHub: mxgrey). This might be something that needs to be addressed in the Is this happening due to multi-threading, or will it still happen even with only a single thread? If it's a multi-threading race condition issue, then maybe we just need to put a mutex in a sensible place in the |
|
Original comment by Diego Ferigo (Bitbucket: dgferigo). Is there any update on this problem? I started testing multi-world simulations and I stumbled upon this problem right away. If this feature is not yet completed, it would be nice at least having a warning printed when the world file is loaded and multiple worlds are found. |
|
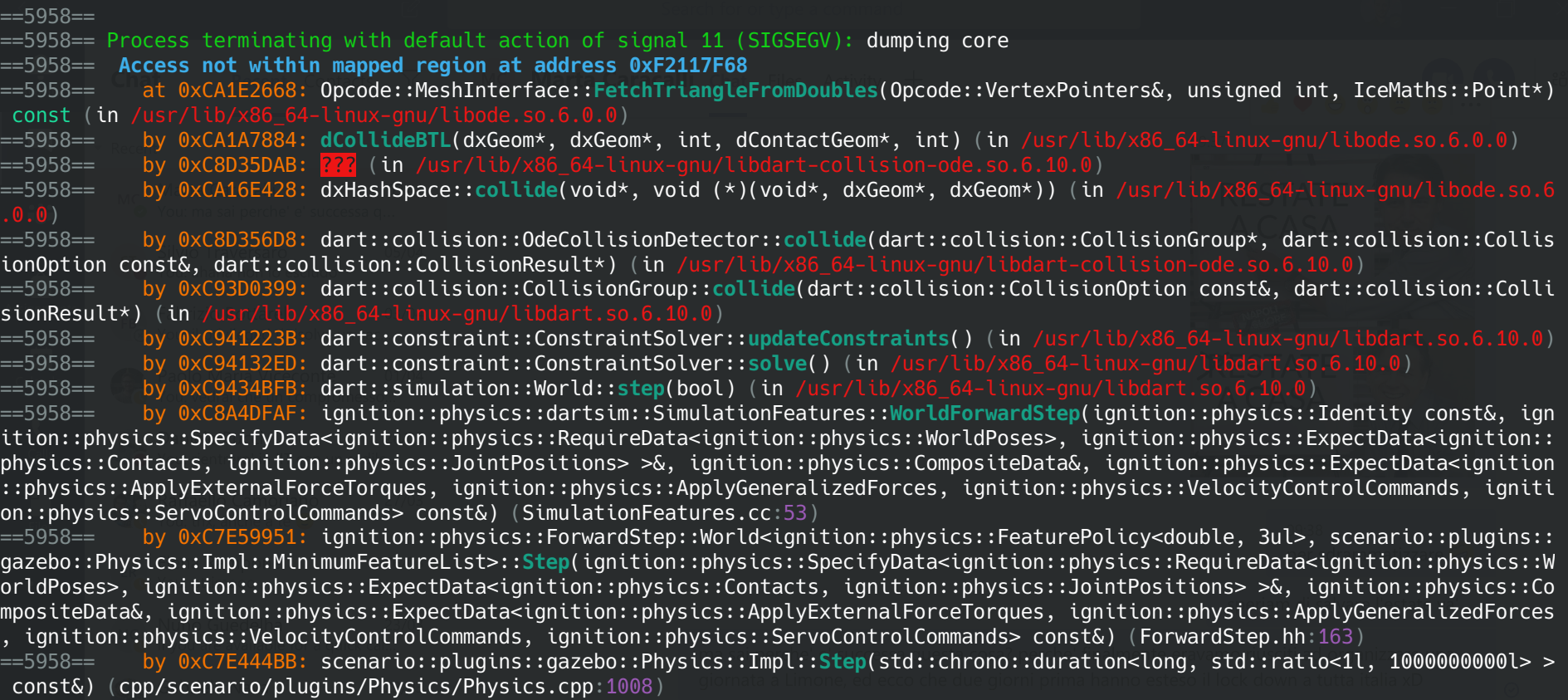
Original comment by Diego Ferigo (Bitbucket: dgferigo). Quick update. With fixed-base simple models like pendulum and cartpole the mutex workaround is effective as I reported in my last comment. However, with complex floating-base models like a humanoid robot with meshes both for visual and collisions, a multiworld setup still segfaults. I managed to “isolate” the problem, if we can say it. In Here below the stack trace (text here):
|
|
Original comment by Addisu Z. Taddese (Bitbucket: azeey, GitHub: azeey). Looks like there is a global cache used by the collision detector in ODE. One thing to try would be to build ode with |
|
Original comment by Diego Ferigo (Bitbucket: dgferigo). Thanks for the suggestion! From my side recompiling ODE would mean that all the chain ODE → DART → ign-physics should be compiled from sources. In this moment I doubt I can dedicate enough time to set everything up and start debugging the problem (also considering that ODE code is not very straighforward to read) 😕 |
We recently experienced this again with @xela-95 in robotology/gz-sim-yarp-plugins#153 . A workaround is to change DART's collision detector not to use |
|
One thing that we could think of at some point in the future (clearly not in an already released version of Gazebo) is to switch the default collision detector in DART from ODE to something else, I am not sure if ODE was chosen just for historical reasons or indeed the is the best performing collision detector for Gazebo's needs. |
If I remember correctly, it was chosen because it worked much better than |
That seems to be still the case, see the corresponding DART issue: dartsim/dart#19 (that seems to be blocked by something, but I am not sure which FCL issue, perhaps flexible-collision-library/fcl#106 ? ). |
|
Yes, indeed looking at bit at issues it seems that each collision detector has some issues, so there is no clearly better DART collision detector, xref: #1306 . Also in https://github.com/resibots/robot_dart it seems that the collision detector used changes from example to example. |
|
I investigate a bit the problem as it occurs in robotology/gz-sim-yarp-plugins#201 for some specific test. I was able to fix the crash with error: with the following DART patch: diff --git a/dart/collision/ode/OdeCollisionDetector.cpp b/dart/collision/ode/OdeCollisionDetector.cpp
index abfd232..ca45ccc 100644
--- a/dart/collision/ode/OdeCollisionDetector.cpp
+++ b/dart/collision/ode/OdeCollisionDetector.cpp
@@ -49,6 +49,8 @@
#include "dart/dynamics/SoftMeshShape.hpp"
#include "dart/dynamics/SphereShape.hpp"
+#include <iostream>
+
namespace dart {
namespace collision {
@@ -216,9 +218,14 @@ double OdeCollisionDetector::distance(
OdeCollisionDetector::OdeCollisionDetector()
{
// Initialize ODE. dInitODE is deprecated.
- const auto initialized = dInitODE2(0);
- assert(initialized);
- DART_UNUSED(initialized);
+ static std::mutex odeInitMutex;
+
+ {
+ std::unique_lock<std::mutex> lock(odeInitMutex);
+ const auto initialized = dInitODE2(0);
+ assert(initialized);
+ DART_UNUSED(initialized);
+ }
dAllocateODEDataForThread(dAllocateMaskAll);that is probably similar to the gz-sim solution proposed by @azeey in 914d44a . This solves the test failures, but those tests use simple models, while apparently this solution still have problems for complex model (like humanoid robots). Probably we can try to extend robotology/gz-sim-yarp-plugins#201 to also include more complex models. fyi @xela-95 |
|
I noticed something unfortunate related to: flaky errors. I tried to work around it by setting another collision manager, but sometimes the test continue to fail. I then realized that the problem is that even if you set another collider, for each world an instance of |
Original report (archived issue) by Louise Poubel (Bitbucket: chapulina, GitHub: chapulina).
Description
Since the very beginning we've had support for multiple
<world>tags within a single SDF file. The current behaviour is that a simulation runner is started for each of them. However, as the code evolved, that use case became less well supported.Steps to Reproduce
At the moment, the following crashes with an ODE assertion:
ign-gazebo -f test/worlds/multiple_worlds.sdfExpected behavior:
At a minimum, no crash. At a maximum, multiple worlds spun up in parallel and running in lockstep, the UI displaying all of them side-by-side.
Actual behavior:
Server crashes, UI freezes.
Reproduces how often:
100% of the time
Versions
ign-gazebo1
Additional Information
I'm not sure if it's best at the moment to:
The text was updated successfully, but these errors were encountered: