[JTC] Trajectory replacement does not interpolate from active trajectory #574
Labels
Comments
|
I seems that this was never ported to ROS 2 ros2_controllers/joint_trajectory_controller/test/test_trajectory_controller.cpp Lines 1229 to 1234 in 83042fb references to |
|
With the work of #714 I started understanding the trajectory generator. The issue described here is no issue at all, this is what happens here:
With
|


Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Describe the bug
While copying documentation from ROS 1 Wiki we realized that the trajectory replacement does not work as expected.
To Reproduce
Steps to reproduce the behavior:
ros2 launch gazebo_ros2_control_demos cart_example_velocity_jtc.launch.pyros2 run gazebo_ros2_control_demos example_position_with_velocity_nonzeroUsed JTC configuration:
Action goal:
traj startis left zero, which means "start now" acc to ROS 1 Wiki and as far as I understand the code here.Expected behavior
The trajectory should be interpolated from the current state (or current desired values) to the new one, as described in the ROS 1 Wiki
Screenshots
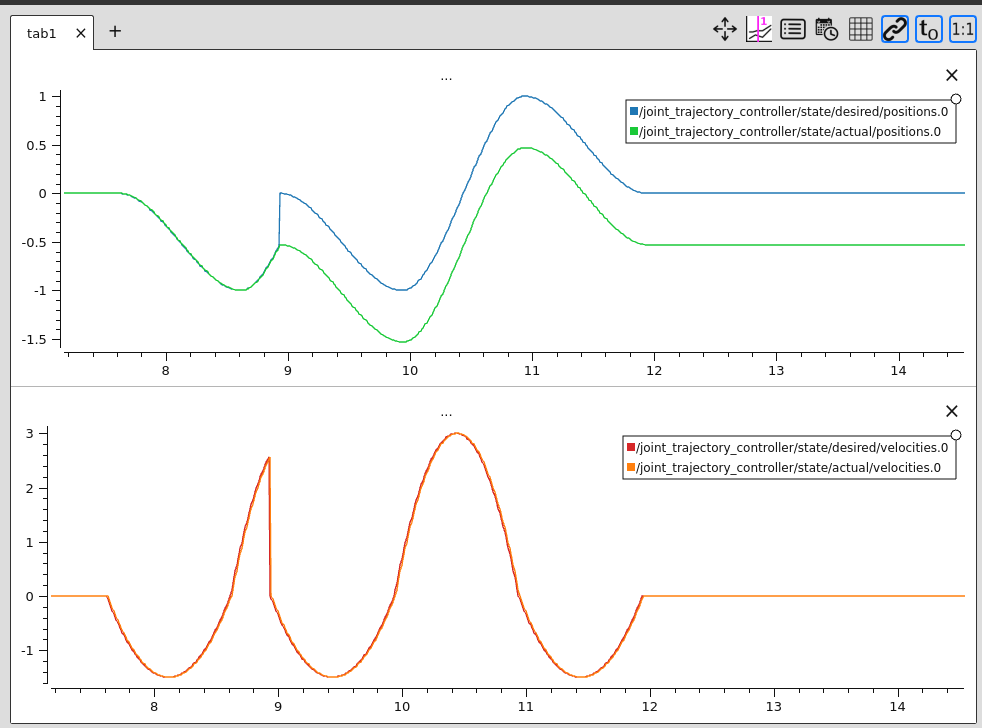
At 9s a new action goal was sent and immediately overridden by the new one:
Environment (please complete the following information):
The text was updated successfully, but these errors were encountered: