Physics CameraSensor lockstep #2746
Conversation
… Add test world file. New test is passing. Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
There was a problem hiding this comment.
nice, overall the strict rate param works for me. I tried changing the world's real time update rate and the camera sensor rate is respected.
On thing I noticed is that these change may have some impact on the RTF. I tried spawning a PR2 model (with no strict rate set) and I get ~0.86 RTF in this branch. But without these changes, I get ~0.95 RTF so close to ~0.1 difference. Maybe we should look at where the slow down occurs later before merging back to the gazebo11 branch.
test/integration/camera_sensor.cc
Outdated
| } | ||
|
|
||
| ///////////////////////////////////////////////// | ||
| TEST_F(CameraSensor, CheckThrottleStrictRate) |
There was a problem hiding this comment.
I'm getting test failures 50% of the time. Not sure if increasing the tolerance is a good idea or not.
[==========] Running 1 test from 1 test case.
[----------] Global test environment set-up.
[----------] 1 test from CameraSensor
[ RUN ] CameraSensor.CheckThrottleStrictRate
[Msg] Waiting for master.
[Msg] Connected to gazebo master @ http://127.0.0.1:11345
[Msg] Publicized address: 192.168.86.31
[Dbg] [ServerFixture.cc:203] ServerFixture load in 1 seconds, timeout after 600 seconds
[Dbg] [camera_sensor.cc:365] timer [5.119] seconds rate [488.377] fps
/home/osrf/code/gz_ws/src/gazebo/test/integration/camera_sensor.cc:367: Failure
Expected: (rate) > (updateRate * (1 - tolerance)), actual: 488.377 vs 490
There was a problem hiding this comment.
So I actually ended up increasing to 0.06 (from 0.02) in another branch... 0.06 being arbitrary for the test numbers on my computer... I thought maybe my computer is slow, but the point of this PR was to make the update rate work regardless of the speed of the machine... so it seems that it isn't quite hitting the rate that's asked of it? Though 488 out of 500 isn't bad, I've gotten as low as 473 before, and that's where 0.06 came from. In normal usage, people might never ask for 500 fps, so it might be okay to raise the tolerance. But then the bit about how this whole lockstep idea is so that any computer can hit the update rate isn't quite satisfied. So, I'm not sure what the original author intended with this tolerance. I can raise it irresponsibly.
There was a problem hiding this comment.
Raised to 0.06 in c134381
There was a problem hiding this comment.
I think it could be timing issue in the test itself. dt is calculated by getting time directly from world while imageCount is from function callback which would be affected by transport delay. Ideally we compute dt based on the timestamp of the first and last image message, which could give us a better estimate of rate.
Not sure if it's a lot of work to verify this. I'm also ok with just increasing the tolerance since the test also passed on jenkins.
There was a problem hiding this comment.
ed6fc04 and bd0085b try to get a time based on the images received, which passed the test 10 times with tolerance lowered to the original 0.02.
I didn't find a place where the timestamp is delivered - it seems rendering::Camera::ConnectNewImageFrame() returns the image in a char *, and doesn't return a stamp. Another option is rendering::Camera::LastRenderWallTime(), but that is wall time and not sim time.
So currently, I am getting the first timestamp manually by checking in the waiting loop for imageCount == 0, which means an iteration before the first image is received. It's still not ideal, in that it might be making the test easier to pass.
I'm consistently getting this rate:
[Dbg] [camera_sensor.cc:354] timer [4.999] seconds rate [500.1] fps
Let me know if you think this change is reasonable, i.e. not too lenient...
|
Re time difference:
The timing difference might explain the The I was hoping the latter commit with its if-conditionals on |
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
|
With strict rate disabled, one difference between now and before is that we use |
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
|
here is a gist of the changes I made to your branch to preserve original behavior / performance. The caveat is that it introduces a Can you take a look and see if performance is better now? thanks. |
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
|
Thank you for looking into the performance! I tested with the gist, and these are the results: No Visualize 30 fps camera: 29-30 Hz, 1.0 RTF With Visualize 30 fps camera: 29-30 Hz, 0.5-0.6 RTF Or, is it possible to do function callbacks for lockstep as well, or must it use pub/sub? |
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
oops sorry I just realized I missed a not in my last comment which gave the opposite meaning. Correction: "when --lockstep is not specified, pose updates are done over pub/sub as opposed to function callback".
yes that's correct. The pose updates are global and we can't tune it for different sensors.
I've also been thinking about this. I don't know if there is a use case of having a mix of strict rate and non-strict rate sensors. If users enable |
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
Signed-off-by: Mabel Zhang <mabel@openrobotics.org>
|
Ready for another review. |
|
Thank you for the review! |
Part of issue #2736. I will keep all the lockstep features in the
respect_fps_gz11newbranch (instead of merging anything togazebo11orgazebo9) until everything lockstep-related is completed, because these features will require changes that are ABI-incompatible, which we will deal with after the feature is working.This PR is for lockstep on CameraSensor class. Most of the mechanics are from
respect_fpsbranch pulled from the old BitBucket PR https://bitbucket.org/osrf/gazebo/pull-requests/2502/make-sure-cameras-fps-is-strictly-appliedWhen readylines ingazebo11branch (added in this BitBucket PR to help ABI-compatibility https://bitbucket.org/osrf/gazebo/pull-requests/3180/use-direct-api-call-to-scene-setposemsg-to/diff ) are uncommented to set pose directly.@scpeters: Are the
When readylines backward compatible?Otherwise, backward compatibility is mostly handled later when I extended to other sensors (#2761 ). The only thing here is that the new test is separated out from the
CheckThrottletest intoCheckThrottleStrictRate.The added_strictRateparameter toServerFixturefor tests might be temporary once we extend to all sensors. We either need this parameter, or have lockstep tests load a SDF with the custom<strict_rate:value>tag, instead of following the current tests' pattern to spawn a world. I think loading a SDF might be cleaner, since the<strict_rate:value>tag is a custom tag and we might not want to have that inServerFixture.To enable, pass in
--lockstepon the command line.To test:
Quantitative test is in
StrictUpdateRate.Qualitative test:
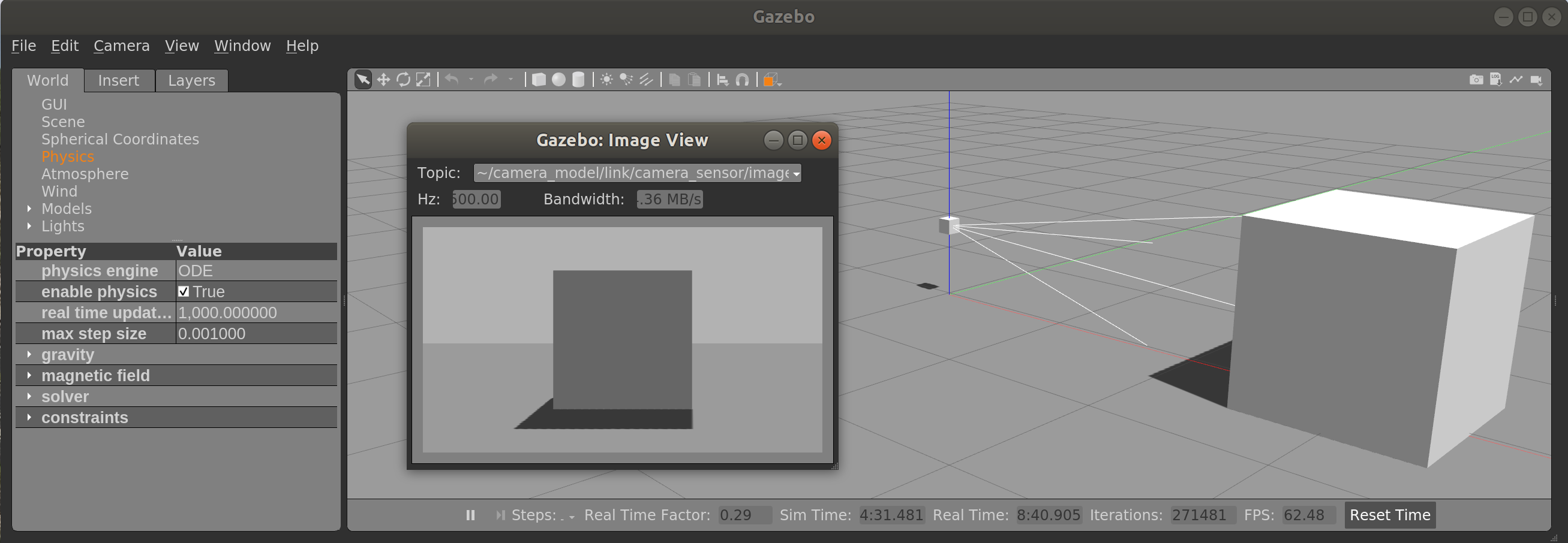
The new SDF contains two cameras, one high frame rate high resolution, one low frame rate low resolution. A pendulum is added to visually verify that physics is slowed down (added after the screenshots).
500 Hz 1280x720 image drops real time factor to 0.3:
30 Hz 320x240 image real time factor is at 1.0:
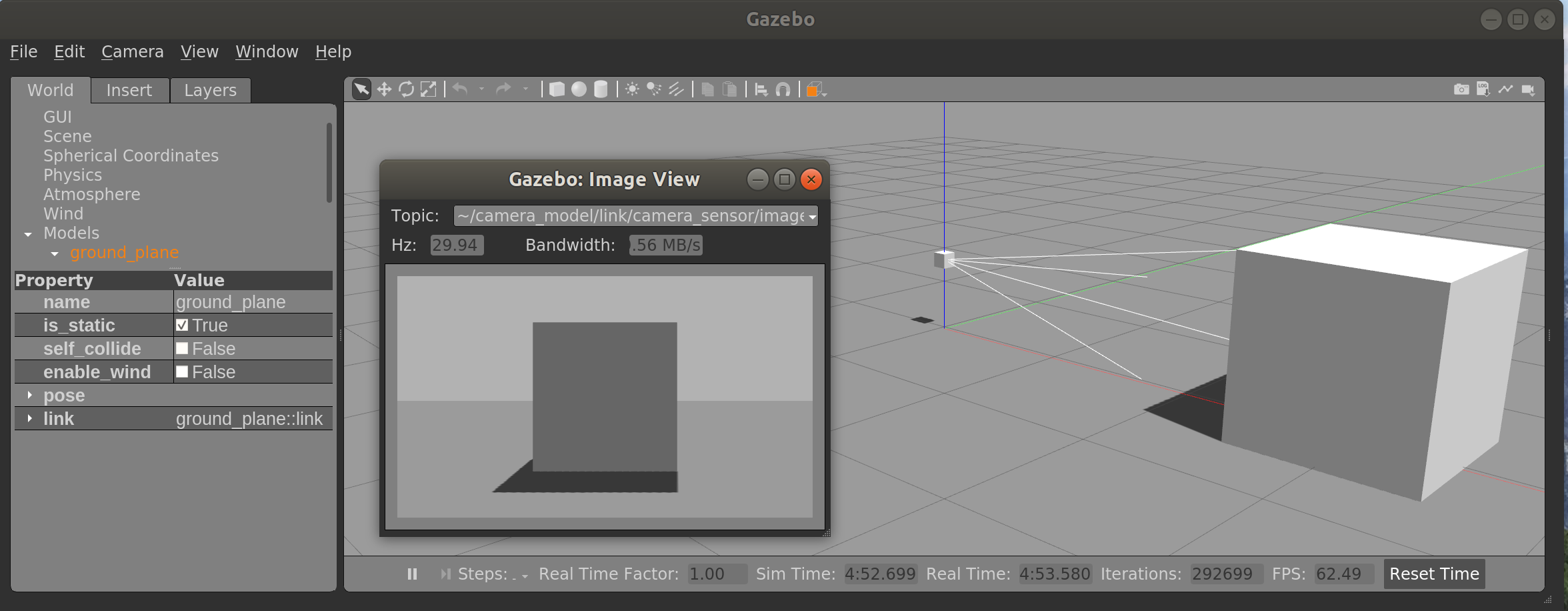
The RTF and the pendulum slowing down show that physics is being slowed down to get the 500 fps.