how_to_use_raspimouse_sim
シミュレータを起動し、画面上にRaspberry Pi Mouseが出現することを確認します。
シミュレータの起動とシミュレータの操作は同じTerminalのウィンドウではできません。 そこで、Terminalをウィンドウを2つ開き、一方でシミュレータを起動、もう一方でシミュレータの操作をします。

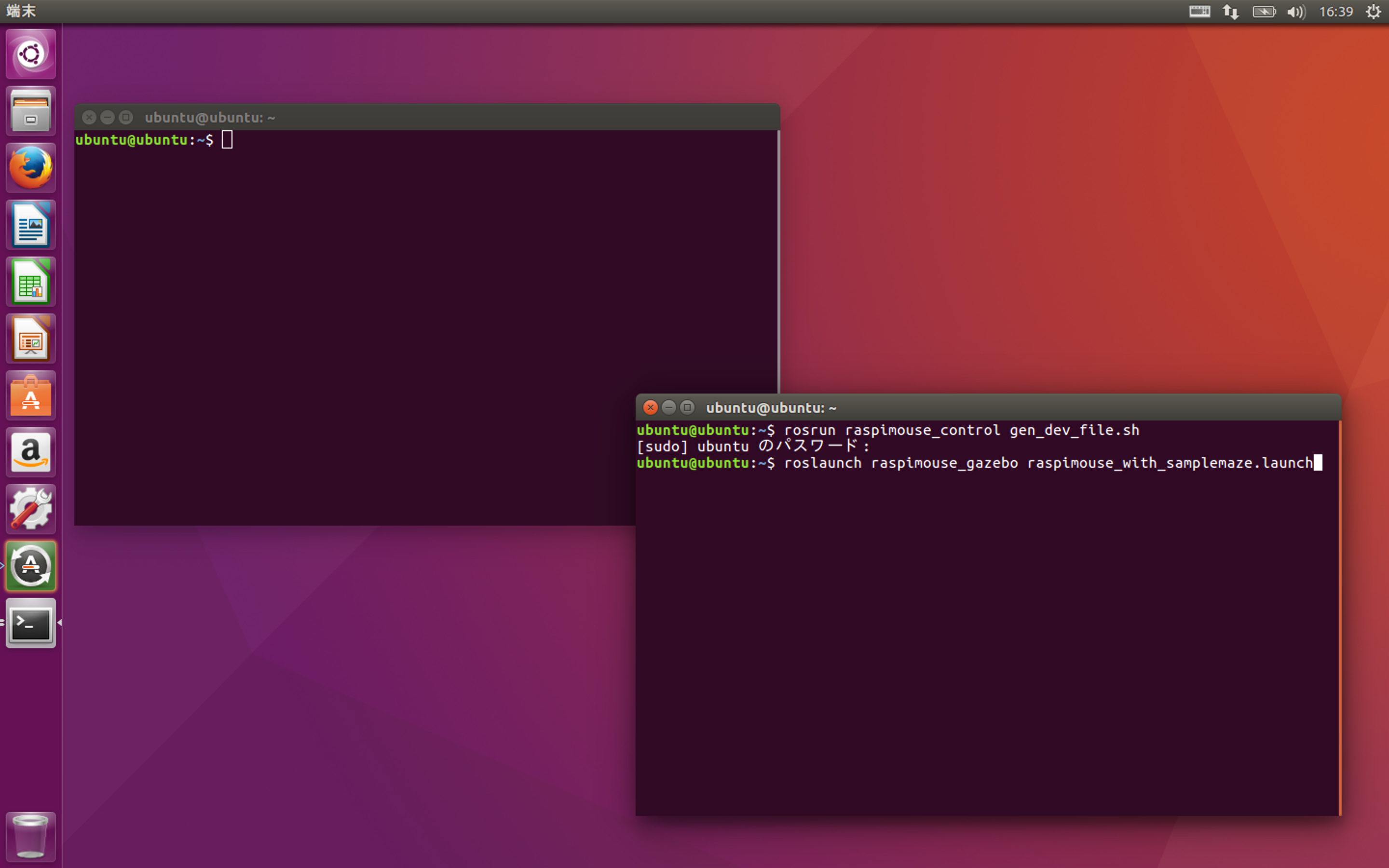
まず、1枚目のウィンドウでシミュレータ用のデバイスファイルを作成します。次のコマンドを入力します。/dev/以下にテキストファイルをつくるため、管理者権限が必要です。
rosrun raspimouse_fake gen_dev_file.sh

次に、同じ1枚目のウィンドウでシミュレータを起動します。
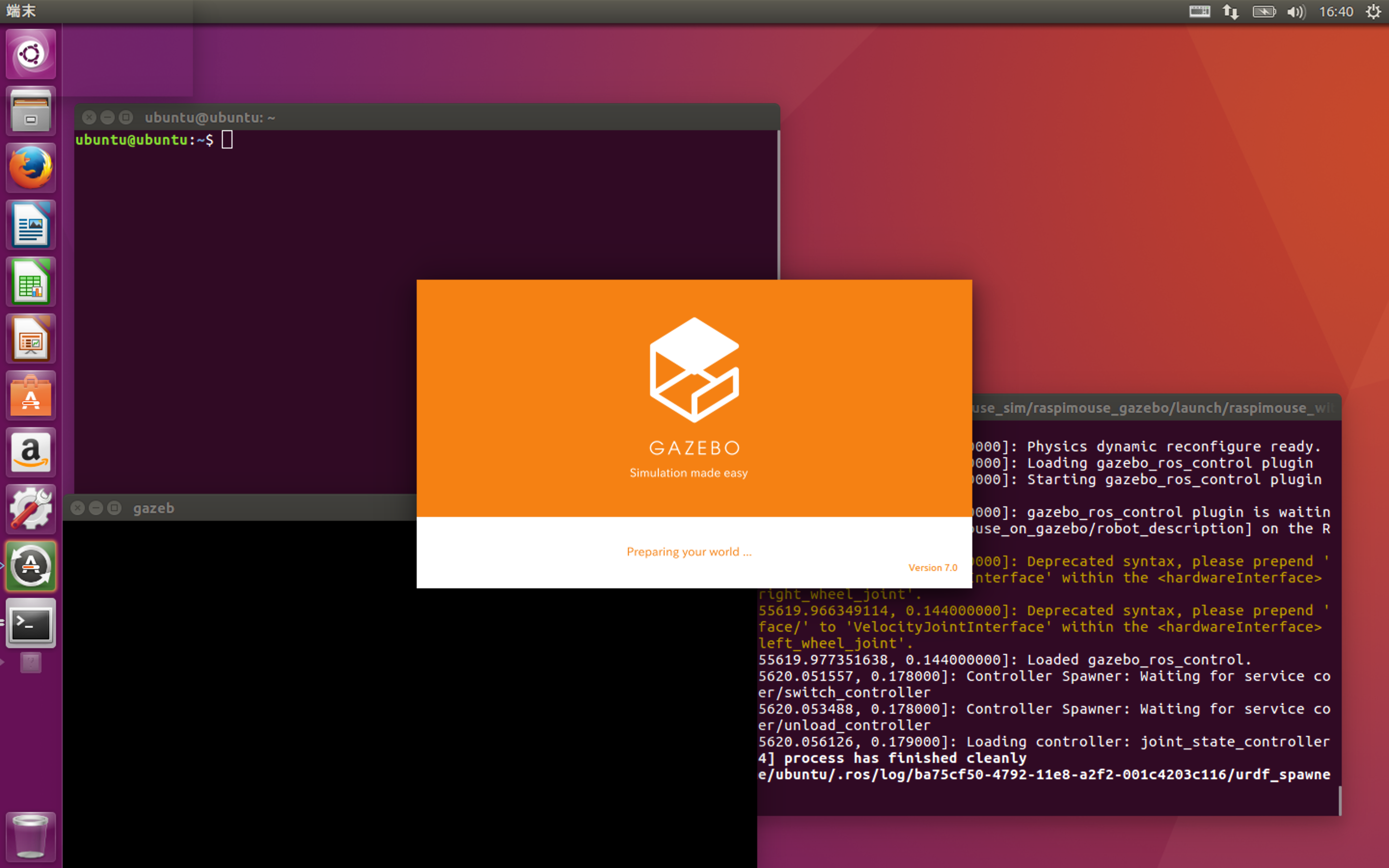
roslaunch raspimouse_gazebo raspimouse_with_samplemaze.launch use_devfile:=true
raspimouse_with_samplemaze.launchでは3x3の簡易迷路が環境として指定されています。
Gazeboが起動しますのでしばらく待ちます。
Gazeboが起動できたのを確認したら、2枚目のウィンドウで以下のコマンドを入力します。
cat /dev/rtlightsensor0

画像のように37 65 516 36など4種類の数字が表示されていればきちんと距離センサがシミュレートできています。
以上で起動確認は完了です。