Calibrated URDF #414
Calibrated URDF #414
Conversation
|
I updated the parameter inclusion to use yaml files instead of the external xacro files. |
The yaml approach makes the description a lot cleaner.
Great! I would wait for @gavanderhoorn before finsihing for all robot models, I think he'll conduct some tests to see if IKFast struggles with more then 1 non-zero rotation in one joint (r, p, y). If IKFast would fail and we wanted to support it, then we would have to add passive joints. I just have some small interrogations:
|
I haven't looked at the inertias, yet. First I wanted to get the base concept final before doing everything multiple times. But yes, you are absolutely right.
I was thinking about this, yes. What kept me from doing this was the fact, that then the calibration algorithm would have to know which model to calibrate for. Currently this doesn't matter, as I drag all the joints to the centerline, as the uncalibrated dh-parameters do, as well, btw. Having the joints stick out to the center of the next link is as far as I understood pure aesthetics. Same goes for the joint orientation· btw. In my models all joints are rotating around their z axis, which is not the case in the current model.
You are talking about this, right? <origin xyz="0 0 ${shoulder_offset}" rpy="${pi/2} 0 ${-pi/2}"/>To my knowledge, there's no such value inside the calibration. Also, in the current file, they are manually set, as the comment says: <!-- Arbitrary offsets for shoulder/elbow joints -->
<xacro:property name="shoulder_offset" value="0.220941" /> <!-- measured from model -->
<xacro:property name="elbow_offset" value="-0.1719" /> <!-- measured from model -->This strongly relates to the second point. I just used the offsets, so the meshes show up roughly at the right place. To make this accurate, one would have to change the meshes depending on the real calibration (e.g. the upper arm being 0.3 mm too long or things like that). What I basically do is moving the meshes out of center on their respective rotation axis, which isn't completely wrong in my opinion. Visually, they look correct and for collision checking you probably won't consider letting something in proximity of half a millimeter to the robot pass, right? Same goes for the inertias. As they are approximations only, anyway, it won't matter too much, if their center is slightly off. |
|
I took some time to fix the inertias to match the link structure. I was a bit surprised that on the kinetic-devel branch they seem to be wrong in a couple of metrics:
I went along and fixed those issues on the way. Please correct me, if I understood something completely wrong here, I usually don't work with gazebo or inertias. |
|
Thanks @fmauch. It could well be that the Gazebo model is incorrect -- I don't normally work with it either and it predates my involvement with these packages by a few years. Overall: would it be possible for you to submit a separate PR with the inertia fixes? That way we don't mix things up and it becomes easier to review. I've also added one in-line comment. |
ur_description/urdf/ur10.urdf.xacro
Outdated
| <xacro:cylinder_inertial radius="0.075" length="0.038" mass="${base_mass}"> | ||
| <origin xyz="0.0 0.0 0.0" rpy="0 0 0" /> | ||
| </xacro:cylinder_inertial> | ||
| </link> |
There was a problem hiding this comment.
What was your motivation for moving this here? base_link is the root of the ROS kinematic chain, and that typically is used to attach the first link of a robot model to.
The base frame is not meant to have any associated visual or collision geometry, but is a frame that is supposed to be coincident with the origin of the 'world' frame of the robot manufacturer.
The fact that the file for the first link is called base.dae here is just a coincidence.
For some more words on base_link, base and their use you could take a look at Coordinate Frames for Serial Industrial Manipulators.
There was a problem hiding this comment.
Thanks for pointing that out. That's the result of calibrating data is based on base, so I attached the chain to base. As gazebo was complaining about inertias, if the shoulder's parent didn't have inertias, I moved geometry and inertia to base.
I was aware, that base should represent the robot's cartesian frame, but I understand, that I didn't follow the REP199 completely. Will fix that :)
In general I think it makes sense to include it in this MR, as without adapting them, inertias resulting out of my changes might be even less correct than before. The CoMs laying in the correct segments automatically fall out of my chain_correction, as the coordinate frames changed, as mentioned earlier.
I can, however skip the correction of the inertia geometry for wrist3, as this will be quite independent.
There was a problem hiding this comment.
In general I think it makes sense to include it in this MR, as without adapting them, inertias resulting out of my changes might be even less correct than before. The CoMs laying in the correct segments automatically fall out of my chain_correction, as the coordinate frames changed, as mentioned earlier.
I would suggest to submit a separate PR. If that PR is deemed OK, we merge it. Then you rebase this PR on top of the new current state.
That would be cleaner I believe.
I was aware, that base should represent the robot's cartesian frame, but I understand, that I didn't follow the REP199 completely
well, the REP isn't an official REP yet, so there is no obligation to follow it. But it would be good to keep it in mind and only do things differently if there is a proper need for it (as the REP also suggests).
There was a problem hiding this comment.
I would suggest to submit a separate PR. If that PR is deemed OK, we merge it. Then you rebase this PR on top of the new current state.
Alright :)
I corrected the base issue and I will have a look over the REP once more.
|
I was mistagged for @fmauch in the post above, but the notification surely went through anyway, as he's the thread author. |
Indeed. Apologies. |
|
I moved out the inertia correction, as proposed by @gavanderhoorn, however I would like to show what this currently leads to: Which is worse compared to the current situation as shown in this post It wouldn't be much of an issue to make them correct (which is currently on another branch: https://github.com/fmauch/universal_robot/tree/inertia) which results in a more correct version: Should I still leave it like that? |


|
The idea was to contribute the fixes to the inertias in a separate PR @fmauch :) We'd still like to get those in, but if you submit a separate PR, we could review those changes in isolation and then get them merged. at that point you can rebase your current Edit: unless I misunderstood you. The fixes that you suggested are -- though related -- not from the calibration procedure, but just general fixes based on the structure of the robot, correct (ie: even uncalibrated it was using incorrect values)? |
I didn't get you suggested to change the order of merging those features... Thank you for your patience with me :) |
|
Just for reference: The MR about inertias is up in #426 |
|
Hey Fellas, I am currently trying to include the calibration offsets for the UR10 into the meshes. I have a xml file that defines the meshes for the UR10. I don't exactly follow the discussion here but is there a way to account for the calibration offsets se when i use the meshes to perform the FK, the flange position matches exactly what the robot controller says. Also, I am currently using IKfast for IK but I am not sure if that would work if the meshes are modified. Any explanation/help is appreciated. These are my calibration offsets |
I don't quite understand, why the meshes are part of the FK. Isn't usually the kinematics (in terms of TF) used for this? Anyway, with the currently pushed version all meshes and inertias should be at the right place. As long as correct kinematics are provided in the yaml file, everything should fall at its place. We hope the new ur_rtde_driver will be release soon, which will include a routine to extract this yaml-file from the robot automatically. |
|
I have a branch rebased ontop of #371 ready only covering CB robots. We should probably think about the order of all of that. Merge #371, rebase #441 ontop of that and then #414 ontop of that? @ipa-led I think, there are some issues regarding the link origins especially with ros-industrial-attic/ur_modern_driver/issues/320 in mind. |
* moved ur_e_description meshes files to ur_description
* one for each models
* removed each model specific xacro * use of yaml files * pass yaml files as parameters * common ur_robo macro * remved ur_gazebo specific parts
* use of yaml files parameters * added e_series * create a common launch file to avoir duplicated
* added e-series
* added e-series
|
Hello, In order to get an accurate model of my UR10 in simulation, I moved the robot in hundreds of positions and get the position in Cartesian and joint space. Then I used scipy to find the DH parameters that minimized the error between the cartesian position and the position from the direct geometrical model. I limited the search around the theoretical DH parameters. I have now this parameters : The error is less than 1 mm and 0.001 rads on the three rotation angles. But I don't get how to create the urdf from the DH parameters as the coordinates of the robot are not the same (all rotations are not on z axis and frames are not at the same position). Does someone know how to fix this ? |
|
Sorry for the spam, but what's the current status of this? https://github.com/UniversalRobots/Universal_Robots_ROS_Driver recommends to use this branch from fmauch and since Universal_Robots_ROS_Driver has been released I wondered if there is actually a "official" branch of this package intended to be used or still the fork? |
|
As long as the official documentation states the branch should be used, the branch should be used. |
|
It's still the fork, as we plan to merge #371 first. |
the kinematics parameters can be retrieved from a calibration mechanism to precisely represent the robot's kinematics.
|
I support this ! I will try to have a look to your code @fmauch so maybe it can help the reviewer. |
|
@fmauch @ipa-led @gavanderhoorn |
|
I think getting everything merged into |
|
Continuing this in #495. |
As URs are factory calibrated and tcp positions can differ to those coming from the decription's FK, it would be nice to reflect this in the description, as well.
I went ahead, creating a model from the calibrated DH parameters, which results in a model, where the two long arm links are far off with one of our robots:
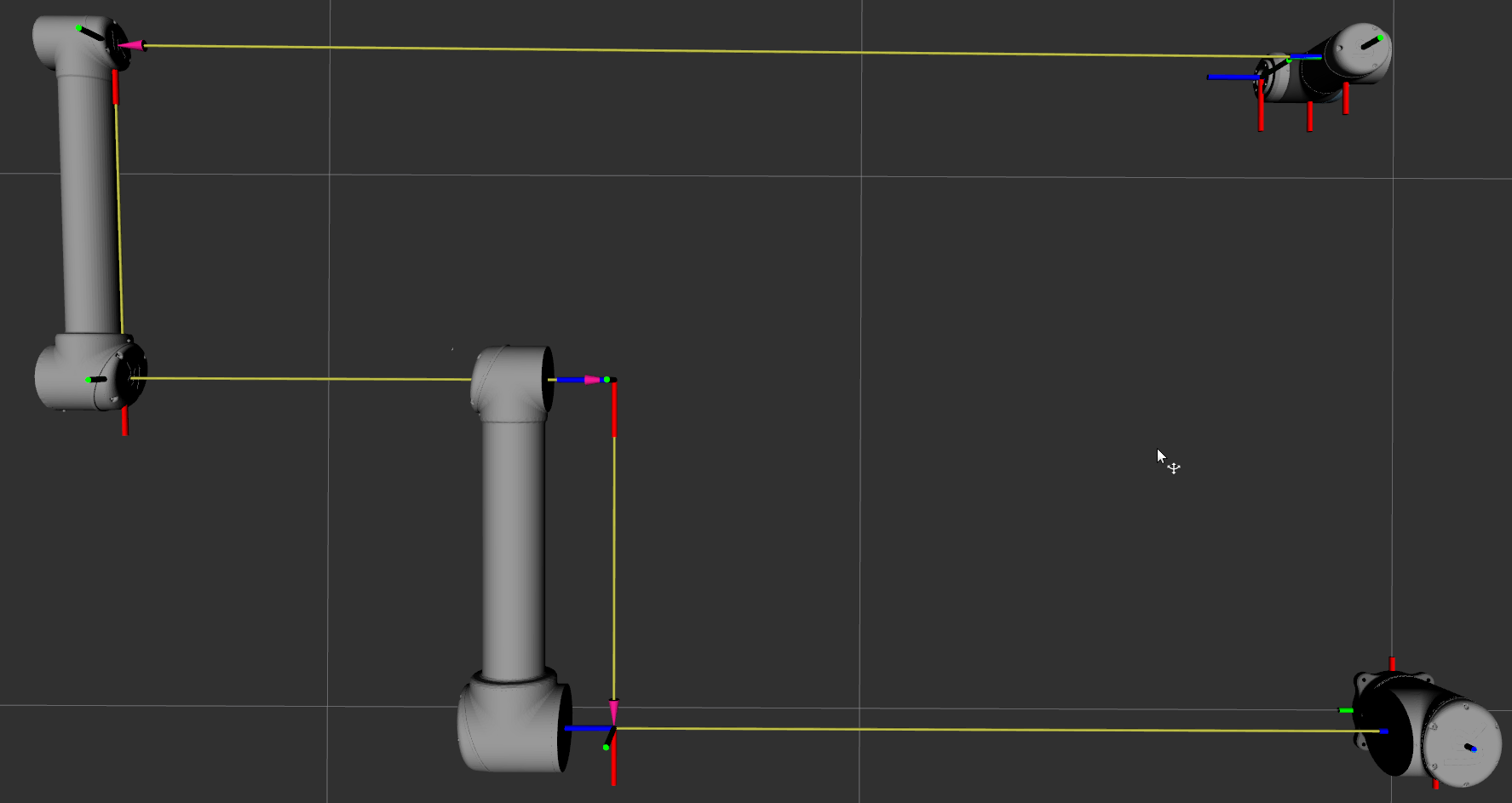
I next wrote a routine that draws in the segments on their rotation axis, which works reliably. This will be released as well, but first I wanted to state the question on how to integrate this. As I don't want to establish another ur_description package, I'd like to integrate it here.
As you can see in the screenshot, I established two links per robot segment to respect the DH parameters. From my calbration-"correction" I gain another set of parameters, where the shoulder and elbow offset are set to 0, so that a visually appealing robot can be modeled. These are of course no strict DH parameters anymore and I needed two additional parameters to counter a rotation introduced by a non-zero alpha parameter when setting the d-parameters to 0.
First of all: I am aware, that a yaml-based presentation as proposed in #371 might be better and I will probably adapt to this later. Also I am aware, that there are a lot of other things attached to this such as inertias, which I haven't covered so far. This is still at an early stage, I just wanted to clarify the direction before implementing something that will get rejected anyway.
Now to the real questions:
To be specific, imagine parameters
alpha_1=pi/2 + 0.2andtheta_2=0.2. This results in a rotationbetween
shoulder_linkandupper_arm_link. Of course, these values are magnitudes higher than anything real, but the problem stays the same.To complete things, I attached a screenshot of our robots using the calibrated URDF, where the error between tool0 and tool0_controller (used by ur_modern) is in the magnitude of 10e-12
I'm happy about any feedback to get this a really cool feature :)